
ผลิตภัณฑ์
19
Jan
เซ็นเซอร์วัดเวลาการเดินทางของแสง (Time of Flight: ToF)
ค้นพบวิธีที่เซ็นเซอร์ Time of Flight (ToF) ใช้ความเร็วของโฟตอนในการสร้างแผนที่โลกแบบ 3 มิติด้วยความแม่นยำระดับเลเซอร์
กล้องวัดระยะการเดินทางของแสง (Time of Flight) ได้ปฏิวัติวงการการทำแผนที่ความลึกและทำให้การนำทางอัตโนมัติในยานพาหนะทางการเกษตร หุ่นยนต์เคลื่อนที่อัตโนมัติ ยานพาหนะขนส่งอัตโนมัติ (AGV) และอื่นๆ เป็นไปอย่างราบรื่น เรียนรู้ว่าเซ็นเซอร์วัดระยะการเดินทางของแสงคืออะไร และส่วนประกอบต่างๆ ของกล้องวัดระยะการเดินทางของแสง
คำว่า เวลาในการเดินทาง (Time-of-Flight) หมายถึง เวลาที่วัตถุใช้ในการเดินทางเป็นระยะทางหนึ่งผ่านตัวกลาง ในการเคลื่อนที่แบบโปรเจคไทล์ เวลาในการเดินทางคือเวลาทั้งหมดตั้งแต่ที่วัตถุถูกยิงออกไปจนถึงเวลาที่วัตถุตกถึงพื้นหรือสัมผัสพื้นผิว ในเทคโนโลยีการถ่ายภาพ เทคนิคเวลาในการเดินทางถูกใช้ในการคำนวณความลึกถึงวัตถุเป้าหมายหรือระยะห่างระหว่างวัตถุสองชิ้น
ในบทความนี้ เราจะเรียนรู้วิธี การใช้งาน Time-of-Flight (ToF) ในกล้องสำหรับ การสร้างแผนที่ความลึก ในแอปพลิเคชันต่างๆ เช่น หุ่นยนต์เคลื่อนที่อัตโนมัติยาน พาหนะทางการเกษตรการวัดขนาดอัตโนมัติ เป็นต้น
เซ็นเซอร์ ToF คืออะไร และทำงานอย่างไร?
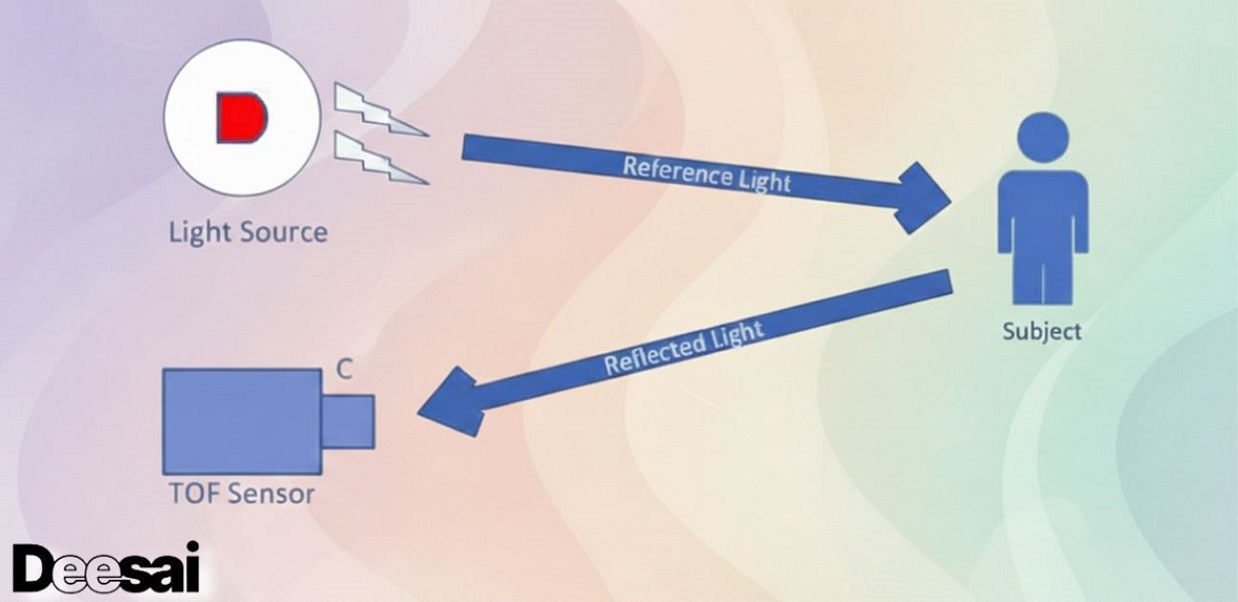
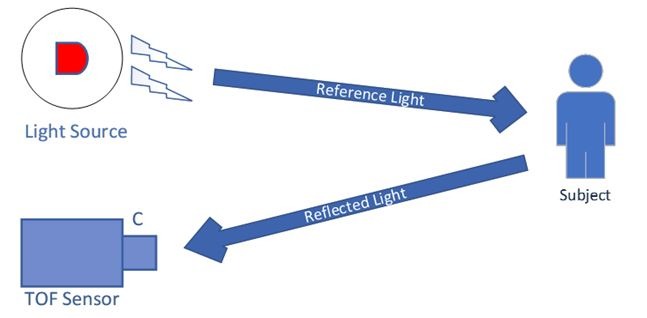
เซ็นเซอร์ ToF คือเซ็นเซอร์ที่ใช้หลักการวัดเวลาในการเดินทางของแสง (Time-of-Flight) เพื่อวัดความลึกและระยะทาง กล้องที่ติดตั้งเซ็นเซอร์ ToF จะวัดระยะทางโดยการส่องแสงไปยังวัตถุด้วยแหล่งกำเนิดแสงที่มีการปรับความถี่ (เช่น เลเซอร์หรือ LED) โดยใช้เซ็นเซอร์ที่ไวต่อความยาวคลื่นของเลเซอร์ (โดยทั่วไปคือ 850 นาโนเมตร หรือ 940 นาโนเมตร) เพื่อจับแสงสะท้อน เซ็นเซอร์จะวัดค่าความล่าช้าของเวลา ∆T จากเวลาที่แสงถูกปล่อยออกมาจนถึงเวลาที่แสงสะท้อนถูกรับโดยกล้องหรือเซ็นเซอร์ ค่าความล่าช้าของเวลานี้เป็นสัดส่วนกับสองเท่าของระยะห่างระหว่างกล้องกับวัตถุ ดังนั้นจึงสามารถประมาณความลึกได้ดังนี้:
d = cΔT/2 โดยที่ c คือความเร็วแสง
ภาพด้านล่างนี้แสดงให้เห็นถึงวิธีการทำงานของกล้อง ToF ในการวัดระยะห่างไปยังวัตถุเป้าหมาย
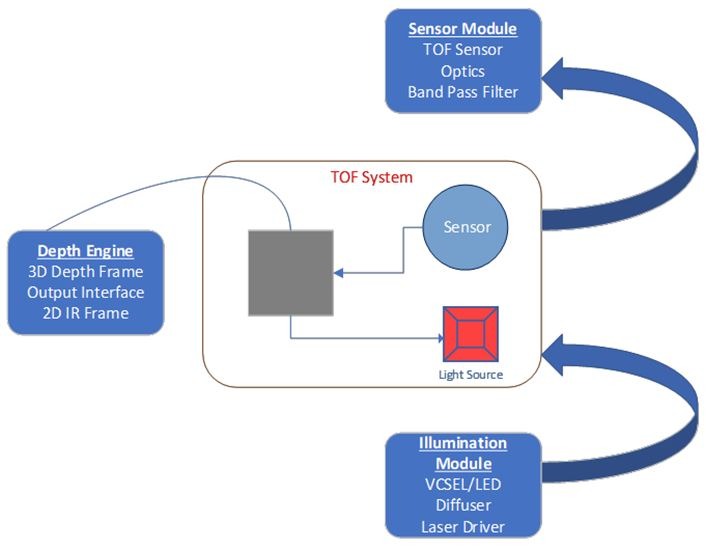
ส่วนประกอบสำคัญของระบบกล้อง Time-of-Flight
ระบบกล้อง Time -of-Flight ประกอบด้วยส่วนประกอบหลัก 3 ส่วน ได้แก่:
- เซ็นเซอร์ ToF และโมดูลเซ็นเซอร์
- แหล่งกำเนิดแสง
- เซ็นเซอร์วัดความลึก
ภาพด้านล่างนี้แสดงให้เห็นถึงส่วนประกอบต่างๆ ในระบบกล้อง Time-of-Flight ได้เป็นอย่างดี:
ต่อไปนี้เราจะมาดูรายละเอียดของแต่ละข้อกัน
เซ็นเซอร์ ToF และโมดูลเซ็นเซอร์
เซ็นเซอร์เป็นส่วนประกอบสำคัญของ ระบบกล้อง ToFเซ็นเซอร์ทำหน้าที่รวบรวมแสงสะท้อนจากฉากและแปลงเป็นข้อมูลความลึกในแต่ละพิกเซลของอาร์เรย์ ยิ่งความละเอียดของเซ็นเซอร์สูงเท่าไร คุณภาพของแผนที่ความลึกที่สร้างขึ้นก็จะยิ่งดีขึ้นเท่านั้น โมดูลเซ็นเซอร์ใน กล้อง ToF ยังมีเลนส์ติดตั้งอยู่ด้วย ซึ่งโดยทั่วไปจะมีรูรับแสงขนาดใหญ่เพื่อประสิทธิภาพการรวบรวมแสงที่ดีขึ้น นอกจากนี้ ตัวกรองแบบแถบความถี่ (ออกแบบมาเพื่อให้แสงที่มีความยาวคลื่น 850 นาโนเมตรและ 940 นาโนเมตรผ่านได้) จะช่วยเพิ่มประสิทธิภาพการส่งผ่านแสงของ VCSEL ให้สูงสุด
แหล่งกำเนิดแสง
ในกล้อง ToF แสงจะถูกสร้างขึ้นโดยใช้เลเซอร์ VCSEL หรือ LED โดยทั่วไป จะใช้แสง NIR (Near Infra-Red) ที่มีความยาวคลื่น 850 นาโนเมตรและ 940 นาโนเมตร VCSEL มาพร้อมกับตัวกระจายแสงซึ่งช่วยกระจายแสงไปด้านหน้าเซ็นเซอร์รับภาพให้ตรงกับ ขอบเขตการมองเห็น (FOV) ของเลนส์ โมดูลนี้ยังมีตัวขับเลเซอร์ซึ่งควบคุมเวลาการขึ้นและลงของรูปคลื่นแสงด้วยขอบที่คมชัด
ตัวประมวลผลความลึก
ตัวประมวลผลความลึกช่วยแปลงข้อมูลพิกเซลดิบพร้อมข้อมูลเฟสจากเซ็นเซอร์ภาพให้เป็นข้อมูลความลึก นอกจากนี้ยังช่วยในการกรองสัญญาณรบกวนและให้ ภาพ อินฟราเรด (IR) แบบพาสซีฟ ซึ่งสามารถนำไปใช้ในแอปพลิเคชันอื่นๆ ได้ อีกด้วย



ผลิตภัณฑ์
January 15, 2026
เซ็นเซอร์วัดเวลาการเดินทางของแสง (Time of Flight: ToF)
ค้นพบวิธีที่เซ็นเซอร์ Time of Flight (ToF) ใช้ความเร็วของโฟตอนในการสร้างแผนที่โลกแบบ 3 มิติด้วยความแม่นยำระดับเลเซอร์
by
นักเขียนบทความ

