
ผลิตภัณฑ์
19
Jan
นาซาใช้เซ็นเซอร์อะไรในการตรวจสอบสภาพอากาศของดาวอังคาร?
ค้นพบระบบเซ็นเซอร์สุดล้ำที่คอยตรวจสอบสภาพอากาศแปรปรวนของดาวอังคาร
Mars Environmental Dynamics Analyzer (MEDA) บนยานสํารวจ Perseverance กําลังแสดงลักษณะเฉพาะของสภาพอากาศบนพื้นผิว ตลอดจนขนาดอนุภาคฝุ่นและสัณฐานวิทยา การทําความเข้าใจพฤติกรรมของฝุ่นเป็นกุญแจสําคัญในการทํานายสภาพอากาศของดาวอังคาร ฝุ่นมีอิทธิพลต่อสภาพอากาศของดาวอังคารในแบบที่น้ําควบคุมสภาพอากาศของโลก เป้าหมายที่เกี่ยวข้องกับสภาพอากาศสองประการของ MEDA ได้แก่ การกําหนดศักยภาพในการทําลายล้างของรังสียูวี คุณสมบัติทางแสงยูวีของฝุ่น อัตราการโฟโตไลซิส และการผลิตสารออกซิแดนท์ และ การประมาณความสามารถในการอยู่อาศัยใต้ผิวดินตามปฏิสัมพันธ์และอุณหภูมิของพื้นดินกับบรรยากาศ.
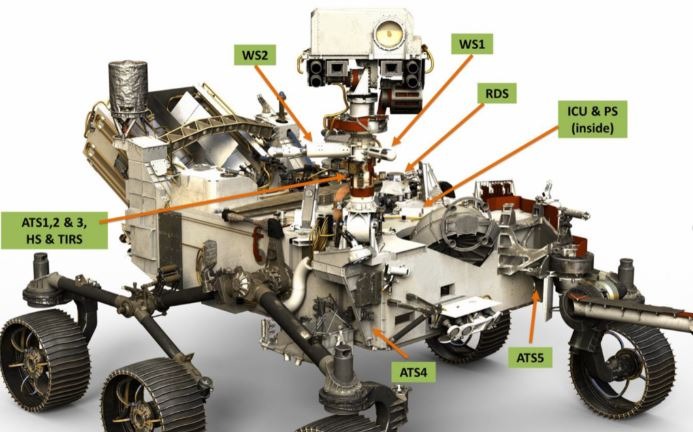
MEDA เป็นโครงการต่อจากสถานีตรวจสอบสิ่งแวดล้อมของรถโรเวอร์ (REMS) บนยานสํารวจ Curiosity MEDA มีขอบเขตที่เพิ่มขึ้น โดยมุ่งเน้นไปที่การรวบรวมข้อมูลที่เกี่ยวข้องกับฝุ่นและรังสีมากขึ้น นอกจากเซ็นเซอร์รังสีและฝุ่นแล้ว เซ็นเซอร์สิ่งแวดล้อม MEDA ยังวัดพารามิเตอร์บรรยากาศหกตัว ได้แก่ ความเร็ว/ทิศทางลม อุณหภูมิอากาศและพื้นดิน ความดัน ความชื้นสัมพัทธ์ และรังสีดวงอาทิตย์ (UV, มองเห็นได้ และ IR) เครื่องมือ MEDA ประกอบด้วยชุดเซ็นเซอร์และชุดควบคุม (รูป 1):
- เซ็นเซอร์ลม WS (เครื่องตรวจจับสองตัว WS1 และ WS2 วางอยู่บนบูมสองตัว)
- เซ็นเซอร์ลม 1 คือ 2 x 6.7 นิ้ว (5 x 17 ซม.)
- เซ็นเซอร์ลม 2 คือ 2 x 15.75 นิ้ว (5 x 40 ซม.)
- เซ็นเซอร์อุณหภูมิอากาศ ATS (เครื่องตรวจจับห้าตัว: สามตัววางอยู่บน RSM และอีกสองตัวที่ด้านหน้าของตัวรถโรเวอร์)
- เซ็นเซอร์แต่ละตัวมีขนาด 2.25 x 1 x 2.7 นิ้ว (5.75 x 2.75 x 6.75 ซม.)
- เซ็นเซอร์อินฟราเรดความร้อน TIRS
- 5 x 2.25 x 2.25 นิ้ว (6.25 x 5.75 x 5.75 ซม.)
- เซ็นเซอร์ความชื้นสัมพัทธ์ HS
- 2 x 1.0 x 2.8 นิ้ว (5.5 x 2.5 x 7.25 ซม.)
- เซ็นเซอร์รังสีและฝุ่น RDS (รวมถึงอิมเมจ SkyCam ด้วย)
- 2 x 4.5 x 5 นิ้ว (13.2 x 11.5 x 12.5 ซม.)
- เพรสเชอร์เซนเซอร์ PS (ภายในชุดควบคุมเครื่องมือ ICU)
- ICU และเซ็นเซอร์ความดัน 5.5 x 5.5 x 5.1 นิ้ว (14 x 14 x 13 ซม.)
เซ็นเซอร์รังสีและฝุ่น
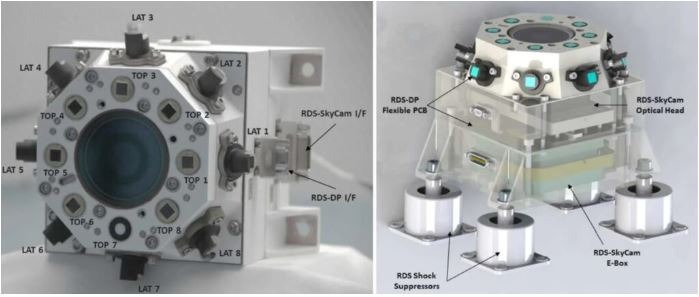
เซ็นเซอร์รังสีและฝุ่น MEDA (RDS) ใช้การผสมผสานระหว่างการถ่ายภาพท้องฟ้าโดยตรงและการวัดแสงแบบกระจายหลายความยาวคลื่นและแนวราบที่ชี้ท้องฟ้าเพื่อตรวจสอบการเปลี่ยนแปลงตามฤดูกาลและรายวันในความลึกของแสงละอองลอย แสงแบบกระจายจะถูกวัดตามความยาวคลื่นและทิศทางเชิงมุมที่แตกต่างกันโดยใช้โฟโตไดโอดแปดชุดสองชุดซึ่งเป็นส่วนหนึ่งของ RDS-Discrete Photodetectors หรือ RDS-DP การถ่ายภาพท้องฟ้าทําได้โดยใช้กล้องมุมกว้างที่มองขึ้นด้านบน RDS-SkyCam RDS บันทึกข้อมูลเป็นเวลาห้านาทีทุกๆ 30 นาที.
RDS เป็นเซ็นเซอร์ที่ซับซ้อนทางอิเล็กทรอนิกส์และกลไกมากที่สุดในชุด MEDA (รูป 2). ประกอบด้วยโฟโตไดโอดแปดชุดสองชุดที่ใช้ใน RDS-DP เพื่อวัดความสว่างของท้องฟ้าเป็นฟังก์ชันของทั้งความยาวคลื่นและมุมราบ โฟโตไดโอดชุดแรก (ช่อง TOP) ชี้ไปที่จุดสุดยอดและครอบคลุมช่วงความยาวคลื่น UV ที่มองเห็นได้และใกล้อินฟราเรดที่ออกแบบมาเพื่อแยกแยะระหว่างฝุ่นและเมฆน้ําแข็งในน้ํา และวัดขนาดอนุภาคละอองลอย กลุ่มที่สองของเครื่องตรวจจับแสงแปดช่อง LAT ชี้เหนือขอบฟ้า 20° และกระจาย 45° ในแนวราบแต่ละช่อง เครื่องตรวจจับด้านข้างทั้งหมดได้รับการออกแบบมาเพื่อวัดความสว่างของท้องฟ้าในทิศทางต่างๆ พร้อมกันโดยมีวัตถุประสงค์เพื่อดึงข้อมูลรูปร่างและขนาดของฝุ่น.
- เพื่อประมาณขนาดอนุภาคและดัชนีการหักเหของแสงของฝุ่นดาวอังคารโดยการรวบรวมความลึกของแสงอัลเบโดการกระเจิงเดี่ยวและฟังก์ชันเฟสของอนุภาคฝุ่นตามฤดูกาลและเวลาท้องถิ่น.
- เพื่อกําหนดความลึกและระดับความสูงของเมฆน้ําแข็งในน้ํา และรวมข้อมูลนั้นกับข้อมูลที่เก็บรวบรวมจากอนุภาคฝุ่นเพื่อสนับสนุนการศึกษาอนุภาคฝุ่นเป็นนิวเคลียสของการควบแน่นของเมฆ.
- เพื่อประเมินความอุดมสมบูรณ์ของโอโซนตามฤดูกาลและเวลาท้องถิ่น และเพื่อวัดอิทธิพลของเมฆที่มีต่อระดับโอโซน.
- เพื่อวัดรังสีดวงอาทิตย์จากรังสียูวีถึงใกล้อินฟราเรด และการเปลี่ยนแปลงรายวันและตามฤดูกาลบนพื้นผิวดาวอังคาร.
เซ็นเซอร์อุณหภูมิอากาศ
เซ็นเซอร์อุณหภูมิอากาศ (ATS) ใช้เทอร์โมคัปเปิลเพื่อวัดโปรไฟล์แนวตั้งของอุณหภูมิอากาศ และการเปลี่ยนแปลงเมื่อบรรยากาศเปลี่ยนจากสภาวะการพาความร้อนในเวลากลางวันที่ไม่เสถียรไปเป็นโปรไฟล์ที่เสถียรในเวลากลางคืน ATS ประกอบด้วยเซ็นเซอร์สามตัวที่กระจายอยู่รอบ ๆ รถโรเวอร์เพื่อแก้ไขอิทธิพลของรถโรเวอร์ รวมถึงเซ็นเซอร์สองตัวที่ด้านข้างของตัวรถโรเวอร์เพื่อวัดการไล่ระดับอุณหภูมิในแนวตั้งใกล้พื้นผิว ATS ให้การวัดอุณหภูมิที่ความสูงสี่ระดับ: 0 ม. (ที่พื้นผิว), 0.84 ม., 1.45 ม. และ 40 ม..
เซ็นเซอร์ความดัน
เซ็นเซอร์ความดัน (PS) เป็นหัวเซ็นเซอร์ความดันแบบ capacitive แบบไมโครแมชชีน ความดันจะเคลื่อนย้ายแผ่นตัวเก็บประจุในเซ็นเซอร์เปลี่ยนความจุ ความจุของเซ็นเซอร์ยังขึ้นอยู่กับอุณหภูมิ ดังนั้นจึงจําเป็นต้องมีการวัดอุณหภูมิอ้างอิงที่แม่นยําเพื่อตีความความจุเอาต์พุตอย่างถูกต้อง MEDA PS ประกอบด้วยทรานสดิวเซอร์ความดัน (ออสซิลเลเตอร์) สองตัวบน PCB หลายชั้นเดียวกัน โดยแต่ละตัวมี ASIC ควบคุมของตัวเอง และแปดช่องสัญญาณที่มีเซ็นเซอร์ capacitive เซ็นเซอร์อุณหภูมิ และตัวเก็บประจุอ้างอิงคงที่ เซ็นเซอร์อุณหภูมิตั้งอยู่บน PCB โดยตรงใกล้กับเซ็นเซอร์ความดันเพื่อให้การวัดอุณหภูมิในการทําความสะอาดที่แม่นยํา เอาต์พุตของแต่ละช่องสัญญาณทั้งแปดในทรานสดิวเซอร์คือความถี่ และช่องอ้างอิงที่มีตัวเก็บประจุคงที่ใช้สําหรับการคํานวณความจุของเซ็นเซอร์จากเอาต์พุตความถี่.
เซ็นเซอร์ความชื้น
เซ็นเซอร์ความชื้น (HS) ประกอบด้วยพอลิเมอร์ที่ใช้งานอยู่ซึ่งเปลี่ยนความจุของเซ็นเซอร์ตามฟังก์ชันของความชื้นสัมพัทธ์และอุณหภูมิที่มีช่วงการวัดความชื้นสัมพัทธ์ (RH) 0 ถึง 100% การตอบสนองระหว่าง 0 ถึง 100% RH เกือบจะเป็นเส้นตรง โพลีเมอร์ทําปฏิกิริยากับความชื้นสัมพัทธ์แม้ว่าอุปกรณ์จะไม่ได้จ่ายไฟก็ตาม ดังนั้นจึงสามารถอ่านค่า RH ได้เกือบจะในทันทีหลังจากเริ่มต้นระบบ อุปกรณ์อิเล็กทรอนิกส์ของเซ็นเซอร์ความชื้นใช้สถาปัตยกรรมทรานสดิวเซอร์เดียวกันกับเซ็นเซอร์ความดัน และรวมถึงเซ็นเซอร์ HS ตัวเก็บประจุอ้างอิง และเซ็นเซอร์อุณหภูมิ PT1000 เซ็นเซอร์และอุปกรณ์อิเล็กทรอนิกส์ที่เกี่ยวข้องทั้งหมดบรรจุอยู่ใน PCB หลายชั้นเดียวที่ป้องกันโดยกรงฟาราเดย์ที่มีรูพรุนโลหะทรงกลมที่หุ้มด้วยแผ่นกรองฝุ่นโพลีเตตระฟลูออโรเอทิลีน (PTFE) ที่ไม่ชอบน้ํา HS ได้รับการออกแบบมาเพื่อปรับปรุงความเข้าใจเกี่ยวกับฟลักซ์ไอน้ําระหว่างพื้นผิวและชั้นบรรยากาศด้านล่าง ซึ่งจะช่วยให้สามารถพัฒนาแบบจําลองการไหลเวียนที่ดีขึ้นและปรับปรุงการประมาณการปริมาณน้ําจากดาวเทียมที่โคจรรอบโลก.
เซ็นเซอร์อินฟราเรดความร้อน
เซ็นเซอร์อินฟราเรดความร้อน (TIRS) ใช้เครื่องวัดรังสีอินฟราเรด (IR) และความยาวคลื่นห้าความยาวคลื่นเพื่อวัดรังสีอินฟราเรดความร้อนคลื่นยาว (LW) ลงและขึ้นที่พื้นผิว รังสีดวงอาทิตย์คลื่นสั้น (SW) ที่สะท้อนที่พื้นผิว อุณหภูมิความสว่างของพื้นผิว และอุณหภูมิอากาศที่ความสูงประมาณ 40 ม. เหนือพื้นผิว TIRS ประกอบด้วยเซ็นเซอร์และแผงปรับอากาศอิเล็กทรอนิกส์ เซ็นเซอร์ประกอบด้วยตัวเรือน แผ่นรองรับที่มีเทอร์โมไพล์ห้าตัว และแผ่นสอบเทียบ แผ่นรองรับช่วยลดการไล่ระดับความร้อนในแพ็คเกจของเทอร์โมไพล์ และใช้สําหรับการสอบเทียบบนเครื่องบินก่อนลงจอดบนดาวอังคาร การอ้างอิงอุณหภูมิมีให้โดยเซ็นเซอร์อุณหภูมิ PT1000 ซ้ําซ้อนสองตัว.
เซ็นเซอร์ลม
เซ็นเซอร์ลม MEDA (WS) บรรจุอยู่ในบูมสองตัวที่วางไว้ที่ความสูงประมาณ 1.5 ม. เหนือฐานของล้อโรเวอร์ และหมุน 120° จากกันรอบเสาโรเวอร์ (รูปที่ 3) รถสํารวจ Curiosity บรรทุกบูมเซ็นเซอร์ลม MEDA รุ่นก่อน WS บน Curiosity ได้รับความเสียหายเมื่อเริ่มภารกิจ อาจเป็นเพราะหินที่กระแทกระหว่างการลงจอด ส่งผลให้ไม่สามารถวัดลมจากด้านหลังของรถโรเวอร์ได้อย่างแม่นยํา นอกจากนี้ เสียงรบกวนในอุปกรณ์อิเล็กทรอนิกส์ของบูมยังหมายความว่าไม่สามารถวัดลมได้ต่ํากว่าอุณหภูมิที่กําหนด ทําให้สูญเสียการวัดลมได้นานถึง 12 ชั่วโมงในชั่วข้ามคืน ปัญหาเหล่านั้นได้รับการแก้ไขด้วย MEDA.
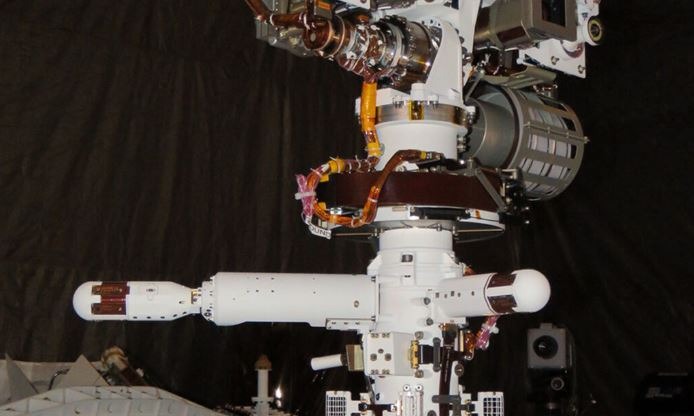
การจัดวาง WS ทั้งสองและการแยก 120° มีจุดประสงค์เพื่อลดการรบกวนของลมของฮาร์ดแวร์โรเวอร์ให้ได้มากที่สุด อย่างไรก็ตาม เสาเองมีผลต่อรูปแบบการไหลของลม ดังนั้นข้อมูลที่รวบรวมพร้อมกันจากบูมทั้งสองจะต้องรวมกันเพื่อสร้างการวัดความเร็วลมและทิศทางที่ถูกต้อง ชุดบูม MEDA WS แต่ละชุดมีบอร์ดทรานสดิวเซอร์เซ็นเซอร์ลม 6 ตัว ซึ่งเป็นสองเท่าของจํานวนที่ใช้ใน Curiosity บอร์ดเพิ่มเติมช่วยให้ MEDA สามารถวัดลมแนวตั้งได้แม่นยํายิ่งขึ้น.
สรุป
MEDA on Perseverance มีเป้าหมายที่เพิ่มขึ้นเมื่อเทียบกับภารกิจก่อนหน้านี้ เช่น Curiosity ความเข้าใจที่ลึกซึ้งยิ่งขึ้นเกี่ยวกับฝุ่นในชั้นบรรยากาศและศักยภาพในการทําลายล้างของรังสียูวี บวกกับปฏิสัมพันธ์ระหว่างอุณหภูมิพื้นดินและชั้นบรรยากาศจะมีความสําคัญเมื่อวางแผนภารกิจที่มีมนุษย์ขับเคลื่อนไปยังดาวอังคารในอนาคต เซ็นเซอร์สิ่งแวดล้อม MEDA ถูกวางไว้ที่ตําแหน่งต่างๆ รอบๆ และภายนอกรถโรเวอร์ และวัดพารามิเตอร์บรรยากาศหกตัว ได้แก่ ความเร็ว/ทิศทางลม อุณหภูมิอากาศและพื้นดิน ความดัน ความชื้นสัมพัทธ์ และรังสีดวงอาทิตย์ (UV, มองเห็นได้ และ IR) นอกเหนือจากรังสียูวีและฝุ่นละออง.


ผลิตภัณฑ์
May 1, 2026
นาซาใช้เซ็นเซอร์อะไรในการตรวจสอบสภาพอากาศของดาวอังคาร?
ค้นพบระบบเซ็นเซอร์สุดล้ำที่คอยตรวจสอบสภาพอากาศแปรปรวนของดาวอังคาร
by
นักเขียนบทความ

