
ผลิตภัณฑ์
19
Jan
เซอร์โวมอเตอร์
ปลดล็อกกลไกของเซอร์โวมอเตอร์และดูว่ามันเปลี่ยนสัญญาณไฟฟ้าธรรมดาให้เป็นการเคลื่อนไหวที่ควบคุมได้อย่างสมบูรณ์แบบได้อย่างไร
เซอร์โวมอเตอร์เป็นมอเตอร์ไฟฟ้าชนิดพิเศษที่ออกแบบมาเพื่อให้สามารถเคลื่อนไหวได้อย่างแม่นยําและแม่นยํา โดยทั่วไปจะใช้ในการใช้งานเช่นหุ่นยนต์หรือเครื่องจักร เซอร์โวมอเตอร์เปรียบเสมือนมอเตอร์อัจฉริยะเพราะสามารถควบคุมตําแหน่ง ความเร็ว และกําลังได้ มอเตอร์นี้ทํางานร่วมกับเซ็นเซอร์ที่บอกว่ามันอยู่ที่ไหน และคอนโทรลเลอร์จะทําให้แน่ใจว่ามันเคลื่อนที่ไปในแบบที่เราต้องการ ผู้คนใช้มอเตอร์เหล่านี้เป็นจํานวนมากในเครื่องจักรขนาดใหญ่ โดยเฉพาะอย่างยิ่งในสถานที่ต่างๆ เช่น โรงงานที่เราต้องการให้สิ่งต่าง ๆ เคลื่อนที่ได้อย่างแม่นยําและราบรื่น บทความนี้กล่าวถึงเซอร์โวมอเตอร์และความสําคัญในด้านต่างๆ เช่น วิทยาการหุ่นยนต์และการผลิต โดยอธิบายวิธีการทํางาน วิธีสร้าง และตําแหน่งที่ใช้กันทั่วไป
เซอร์โวมอเตอร์เป็นเหมือนเครื่องยนต์ขนาดเล็กที่ทรงพลังซึ่งมีอัตราส่วนแรงบิดต่อความเฉื่อยสูง ซึ่งหมายความว่าสามารถสร้างแรงบิดได้มากเมื่อเทียบกับขนาดและน้ําหนัก ทําให้เหมาะสําหรับงานที่ต้องการการเร่งความเร็ว การชะลอตัว และการเคลื่อนไหวที่แม่นยําอย่างรวดเร็ว มีหลายขนาดและระดับพลังงานเพื่อให้เหมาะกับงานที่แตกต่างกัน และสามารถขับเคลื่อนด้วยแรงดันไฟฟ้ากระแสสลับหรือกระแสตรง สิ่งที่ดีคือเราสามารถควบคุมความเร็วและแรงได้โดยใช้สัญญาณพิเศษที่เรียกว่าการมอดูเลตความกว้างพัลส์ (PWM) เซอร์โวมอเตอร์บางตัวมีคุณสมบัติพิเศษ เช่น ตัวควบคุมในตัวและอินเทอร์เฟซการสื่อสาร ซึ่งทําให้สามารถปรับเปลี่ยนได้และง่ายต่อการรวมเข้ากับระบบที่ซับซ้อน
เซอร์โวมอเตอร์คืออะไร?
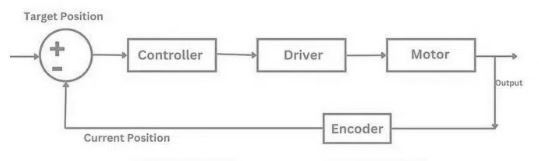
เซอร์โวมอเตอร์เป็นแอคชูเอเตอร์แบบหมุนที่ช่วยให้สามารถควบคุมตําแหน่งเชิงมุมได้อย่างแม่นยํา ประกอบด้วยมอเตอร์ ระบบป้อนกลับ และตัวควบคุม ระบบป้อนกลับจะตรวจสอบตําแหน่งที่แท้จริงของมอเตอร์อย่างต่อเนื่องและปรับให้ตรงกับตําแหน่งที่ต้องการ คอนโทรลเลอร์จะตีความความแตกต่างระหว่างตําแหน่งจริงและตําแหน่งที่ต้องการ โดยส่งสัญญาณไปยังมอเตอร์เพื่อแก้ไขการเปลี่ยนแปลงใดๆ
การก่อสร้างเซอร์โวมอเตอร์
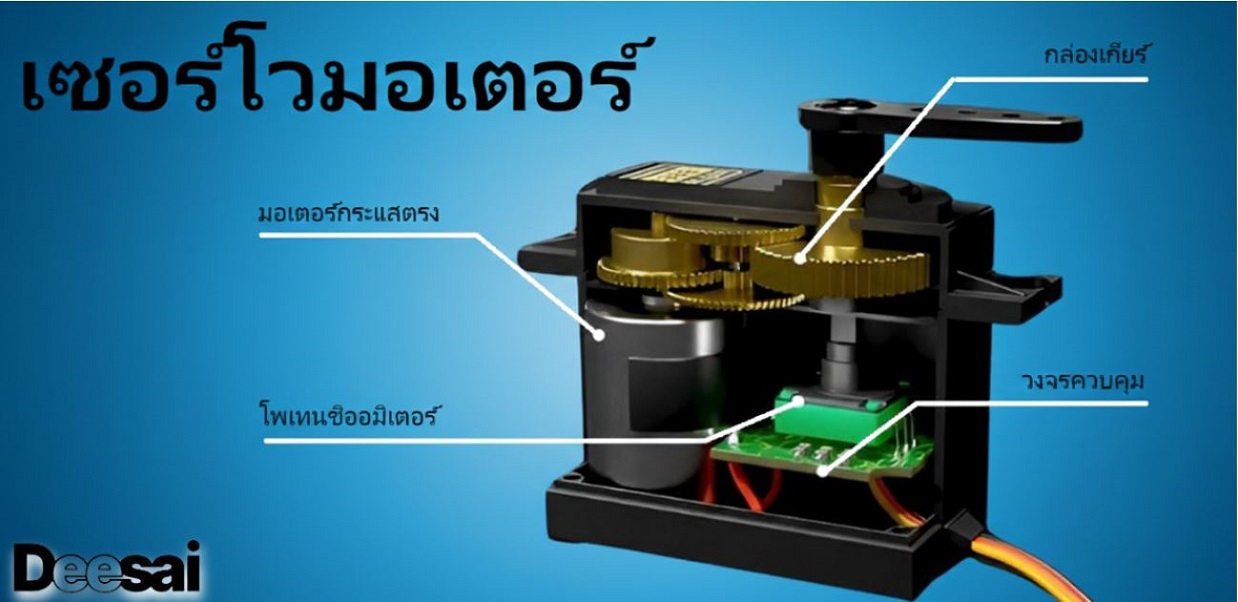
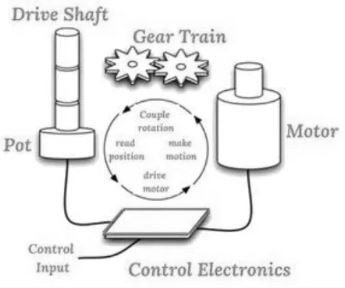
การสร้างเซอร์โวมอเตอร์เกี่ยวข้องกับส่วนประกอบหลักหลายอย่างที่ใช้เพื่อควบคุมตําแหน่งเชิงมุมได้อย่างแม่นยํา เซอร์โวมอเตอร์คล้ายกับมอเตอร์ทั่วไป แต่มีชิ้นส่วนเพิ่มเติมเพิ่มเติมเพื่ออํานวยความสะดวกในการควบคุมตําแหน่ง ส่วนประกอบที่จําเป็นเหล่านี้ ได้แก่ เซ็นเซอร์ เกียร์ และวงจร มอเตอร์ถูกนําทางโดยคอนโทรลเลอร์ เช่น Arduino หรือ STM ในงานอุตสาหกรรม เซอร์โวมอเตอร์ AC ใช้ตัวเข้ารหัสเป็นเซ็นเซอร์ตําแหน่ง ในขณะที่เซอร์โวมอเตอร์ DC ใช้โพเทนชิออมิเตอร์เพื่อจุดประสงค์นี้
เซอร์โวมอเตอร์กระแสตรงประกอบขึ้นโดยการรวมมอเตอร์กระแสตรงเข้ากับส่วนประกอบต่างๆ เช่น กระปุกเกียร์ คอนโทรลเลอร์ และโพเทนชิออมิเตอร์ ในทางกลับกันเซอร์โวมอเตอร์ AC ใช้มอเตอร์เหนี่ยวนําเสริมด้วยเกียร์และตัวเข้ารหัสเพื่อการควบคุมที่แม่นยํา
ส่วนประกอบของเซอร์โวมอเตอร์
- โรเตอร์และสเตเตอร์: แกนกลางของเซอร์โวมอเตอร์ประกอบด้วยสองส่วนหลัก: โรเตอร์ (ส่วนที่เคลื่อนไหว) และสเตเตอร์ (ส่วนที่อยู่กับที่) โดยทั่วไปโรเตอร์จะเชื่อมต่อกับเพลาส่งออกซึ่งมีหน้าที่สร้างการเคลื่อนไหว
- อุปกรณ์ป้อนกลับ: รวมอยู่ในเซอร์โวมอเตอร์เป็นอุปกรณ์ป้อนกลับ ซึ่งมักอยู่ในรูปแบบของตัวเข้ารหัสหรือตัวแก้ไข อุปกรณ์นี้จะตรวจสอบตําแหน่งที่แท้จริงของโรเตอร์อย่างต่อเนื่องและให้ข้อมูลนี้แก่คอนโทรลเลอร์
- ตัวควบคุม: ตัวควบคุมเป็นส่วนที่สําคัญที่สุดของระบบเซอร์โวมอเตอร์ มันตีความข้อเสนอแนะจากตัวเข้ารหัสและเปรียบเทียบกับตําแหน่งที่ต้องการ หากมีความแตกต่าง คอนโทรลเลอร์จะคํานวณการปรับที่จําเป็น
- อินพุตควบคุม: เซอร์โวมอเตอร์รับอินพุตควบคุม โดยปกติจะอยู่ในรูปแบบของพัลส์ไฟฟ้า คอนโทรลเลอร์ใช้อินพุตนี้เพื่อกําหนดว่ามอเตอร์ควรเคลื่อนที่มากน้อยเพียงใดและไปในทิศทางใด
- พาวเวอร์ซัพพลาย: มอเตอร์ต้องการแหล่งจ่ายไฟ โดยทั่วไปจะอยู่ในรูปแบบของกระแสตรง (DC) หรือกระแสสลับ (AC) ขึ้นอยู่กับประเภทของมอเตอร์
- Gear Train (อุปกรณ์เสริม): ในเซอร์โวมอเตอร์บางรุ่น โดยเฉพาะอย่างยิ่งที่ใช้ในหุ่นยนต์ อาจมีชุดเกียร์รวมอยู่ด้วย amplify แรงบิดหรือปรับความเร็วของเพลาส่งออก
การทํางานของเซอร์โวมอเตอร์
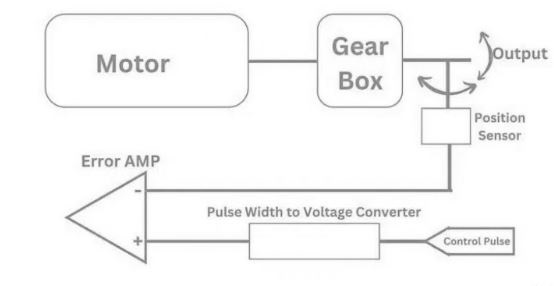
เซอร์โวมอเตอร์ทํางานด้วยวิธีที่ง่ายและเข้าใจง่าย โดยปกติเซอร์โวมอเตอร์จะมีระบบที่เรียกว่าการควบคุมวงปิด ระบบนี้ประกอบด้วยตัวเปรียบเทียบและเส้นทางป้อนกลับ มันเหมือนกับการตั้งค่าที่ตรวจสอบและปรับมอเตอร์อย่างต่อเนื่องเพื่อให้อยู่ในตําแหน่งที่เหมาะสม ตัวเปรียบเทียบเป็นส่วนสําคัญของเซอร์โวมอเตอร์ ตรวจสอบอย่างรอบคอบว่ามอเตอร์อยู่ที่ไหนในขณะนี้และเปรียบเทียบกับตําแหน่งที่ควรจะเป็น หากมีความแตกต่าง แสดงว่ามีข้อผิดพลาด โดยบอกให้มอเตอร์ทําการปรับเปลี่ยนที่จําเป็นเพื่อให้ไปยังตําแหน่งที่ถูกต้อง
บล็อกไดอะแกรมด้านล่างแสดงส่วนประกอบของระบบควบคุมเซอร์โวมอเตอร์มาตรฐาน:
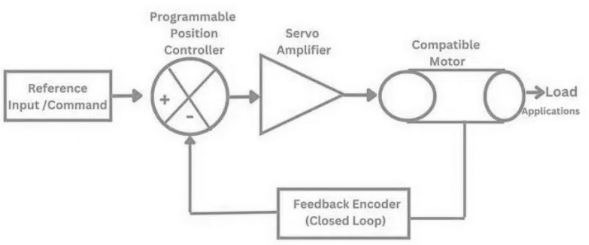
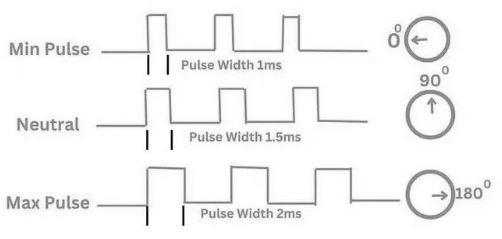
เซอร์โวมอเตอร์มักถูกควบคุมโดยใช้วิธีการที่เรียกว่า Pulse Width Modulation (PWM) เทคนิคนี้ต้องการการส่งสัญญาณไฟฟ้าที่มีพัลส์ที่มีความยาวต่างกันไปยังมอเตอร์ พัลส์เหล่านี้มีความกว้างที่แตกต่างกันระหว่าง 1 ถึง 2 มิลลิวินาทีและจะถูกส่งซ้ํา ๆ ในอัตรา 50 ครั้งต่อวินาทีไปยังเซอร์โวมอเตอร์ การปรับความกว้างของพัลส์ทําหน้าที่เป็นวิธีการควบคุมตําแหน่งของเพลาหมุนในเซอร์โวมอเตอร์อย่างมีประสิทธิภาพ พูดง่ายๆ ก็คือ การเปลี่ยนระยะเวลาของพัลส์เหล่านี้จะนําทางมอเตอร์ในการบรรลุตําแหน่งที่ต้องการสําหรับเพลาหมุน
ประเภทของเซอร์โวมอเตอร์
เซอร์โวมอเตอร์แบ่งออกเป็นสองประเภทอย่างกว้างๆ ขึ้นอยู่กับแหล่งพลังงาน:
- เซอร์โวมอเตอร์กระแสตรง
- เซอร์โวมอเตอร์ AC
เซอร์โวมอเตอร์กระแสตรง
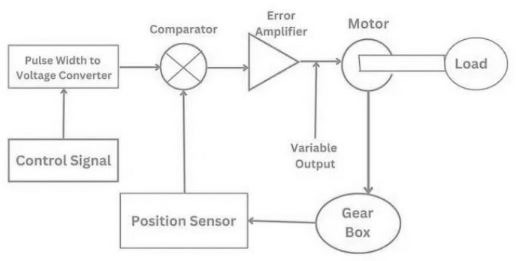
เซอร์โวมอเตอร์กระแสตรงประกอบด้วยส่วนประกอบที่จําเป็น เช่น มอเตอร์กระแสตรง เซ็นเซอร์ตําแหน่ง ชุดเกียร์ และวงจรควบคุม มอเตอร์นี้ช่วยให้ควบคุมความเร็วและตําแหน่งได้อย่างแม่นยํา ในการตั้งค่าเอาต์พุตที่ต้องการแรงดันไฟฟ้าอ้างอิง DC จะถูกกําหนดโดยใช้โพเทนชิออมิเตอร์ตัวแปลงพัลส์หรือตัวจับเวลา ในการควบคุมแบบดิจิตอลไมโครโปรเซสเซอร์จะสร้างพัลส์ PWM เพื่อความแม่นยํา ข้อเสนอแนะที่ได้รับจากโพเทนชิออมิเตอร์จะนําทางแอมพลิฟายเออร์ข้อผิดพลาดเพื่อให้มั่นใจได้ถึงตําแหน่งมอเตอร์ที่แม่นยํา แอมพลิฟายเออร์เปรียบเทียบตําแหน่งปัจจุบันและตําแหน่งที่ต้องการสร้างแรงดันข้อผิดพลาดที่จ่ายไฟให้กับมอเตอร์จนกว่าข้อผิดพลาดจะเป็นศูนย์ช่วยให้หมุนได้อย่างแม่นยํา
เซอร์โวมอเตอร์ AC
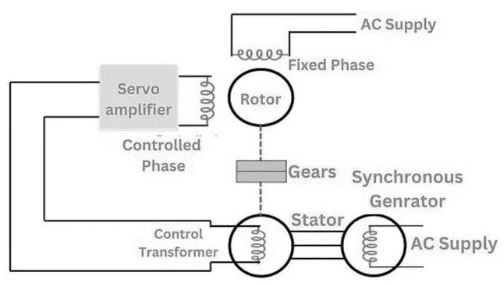
เซอร์โวมอเตอร์ไฟฟ้ากระแสสลับเป็นเซอร์โวมอเตอร์ชนิดหนึ่งที่แปลงไฟฟ้ากระแสสลับให้เป็นการเคลื่อนไหวทางกลที่แม่นยําโดยเน้นที่ความเร็วเชิงมุมที่แม่นยํา โดยพื้นฐานแล้วมอเตอร์เหล่านี้เป็นมอเตอร์เหนี่ยวนําสองเฟสซึ่งมีความแตกต่างในการออกแบบเฉพาะ พวกเขาผลิตพลังงานกลตั้งแต่ไม่กี่วัตต์ถึงหลายร้อยวัตต์ โดยทํางานภายในช่วงความถี่ 50 ถึง 400 Hz สิ่งที่ทําให้พวกเขาแตกต่างคือการใช้ระบบควบคุมวงปิด โดยใช้ตัวเข้ารหัสเพื่อตรวจสอบความเร็วและตําแหน่ง คุณลักษณะนี้ทําให้มอเตอร์เหล่านี้เชี่ยวชาญเป็นพิเศษในด้านความแม่นยําและการควบคุม ซึ่งแตกต่างจากมอเตอร์อื่นๆ ที่ขาดระบบป้อนกลับขั้นสูง
ลักษณะของเซอร์โวมอเตอร์
เซอร์โวมอเตอร์มีคุณสมบัติสําคัญหลายประการที่ทําให้เป็นตัวเลือกที่ยอดเยี่ยมสําหรับการใช้งานที่ต้องการการควบคุมและความแม่นยําที่แม่นยํา นี่คือลักษณะสําคัญบางประการของเซอร์โวมอเตอร์:
- ความแม่นยําสูง: เซอร์โวมอเตอร์ให้การควบคุมตําแหน่ง ความเร็ว และแรงบิดที่แม่นยํา ความแม่นยํานี้ทําได้โดยการใช้อุปกรณ์ป้อนกลับ เช่น ตัวเข้ารหัส ซึ่งจะตรวจสอบตําแหน่งที่แท้จริงของมอเตอร์อย่างต่อเนื่องและให้ข้อเสนอแนะแก่คอนโทรลเลอร์
- เวลาตอบสนองที่รวดเร็ว: เซอร์โวมอเตอร์มีเวลาตอบสนองที่น่าประทับใจ ช่วยให้สามารถปรับความเร็วและตําแหน่งได้อย่างรวดเร็วตามสัญญาณอินพุตที่เปลี่ยนไป
- แรงบิดสูง: ลักษณะเด่นอีกประการหนึ่งของเซอร์โวมอเตอร์คือความสามารถในการส่งแรงบิดสูงแม้ในความเร็วต่ํา เอาต์พุตแรงบิดสูงของเซอร์โวมอเตอร์ช่วยให้มั่นใจได้ว่าสามารถรับมือกับงานหนักและทํางานได้อย่างแม่นยํา
- การควบคุมวงปิด: เซอร์โวมอเตอร์ทํางานในระบบควบคุมวงปิด ซึ่งหมายความว่าจะได้รับข้อเสนอแนะอย่างต่อเนื่องเกี่ยวกับตําแหน่งที่แท้จริงและปรับประสิทธิภาพให้เหมาะสม
- ช่วงความเร็วกว้าง: เซอร์โวมอเตอร์มีช่วงความเร็วกว้าง ทําให้สามารถทํางานได้ทั้งความเร็วสูงและต่ําโดยไม่ลดทอนประสิทธิภาพ
- ความเฉื่อยต่ํา: ความเฉื่อยของโรเตอร์ต่ําช่วยให้เร่งความเร็วและชะลอตัวได้อย่างรวดเร็ว ซึ่งก่อให้เกิดสมรรถนะแบบไดนามิกของมอเตอร์
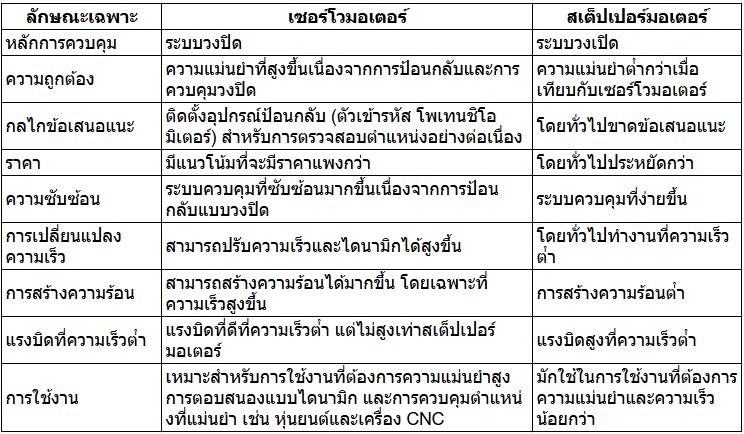
ความแตกต่างระหว่างสเต็ปเปอร์มอเตอร์และเซอร์โวมอเตอร์
ทั้งสเต็ปเปอร์มอเตอร์และเซอร์โวมอเตอร์มีข้อดีของตัวเองและเหมาะสําหรับการใช้งานที่แตกต่างกัน เมื่อเข้าใจความแตกต่าง คุณจะสามารถตัดสินใจได้อย่างชาญฉลาดเมื่อเลือกมอเตอร์ที่เหมาะกับความต้องการเฉพาะของคุณมากที่สุด
วิธีการควบคุมเซอร์โวมอเตอร์?
เซอร์โวมอเตอร์ทํางานโดยการส่งพัลส์ไฟฟ้าที่เรียกว่าการมอดูเลตความกว้างพัลส์ (PWM) ผ่านสายควบคุม พัลส์นี้มีความกว้างที่แปรผันและประกอบด้วยค่าต่ําสุดและสูงสุดพร้อมกับอัตราการทําซ้ํา โดยทั่วไปเซอร์โวมอเตอร์จะมีช่วงการเคลื่อนไหวที่จํากัด โดยปกติจะรวม 180° โดยมีความสามารถในการหมุน 90° ในทิศทางใดทิศทางหนึ่งจากตําแหน่งที่เป็นกลาง ตําแหน่งที่เป็นกลางคือจุดที่เซอร์โวสามารถหมุนได้เท่า ๆ กันทั้งในทิศทางตามเข็มนาฬิกาและทวนเข็มนาฬิกา
ตําแหน่งของเพลาของเซอร์โวมอเตอร์ถูกกําหนดโดยระยะเวลาของพัลส์ PWM ที่ส่งผ่านสายควบคุม มอเตอร์คาดว่าจะได้รับพัลส์ทุกๆ 20 มิลลิวินาที (ms) และความยาวของพัลส์จะเป็นตัวกําหนดว่ามอเตอร์จะหมุนไปไกลแค่ไหน ตัวอย่างเช่น พัลส์ 1.5ms จะวางตําแหน่งมอเตอร์ไว้ที่ 90° พัลส์ที่สั้นกว่า 1.5 มิลลิวินาทีจะเคลื่อนมอเตอร์ทวนเข็มนาฬิกาไปทางตําแหน่ง 0 °ในขณะที่พัลส์ที่ยาวกว่า 1.5 มิลลิวินาทีทําให้เซอร์โวหมุนตามเข็มนาฬิกาไปทางตําแหน่ง 180 องศา
เมื่อถูกนําไปยังตําแหน่งเฉพาะเซอร์โวเหล่านี้จะรักษาและต้านทานแรงภายนอกที่พยายามแทนที่ ขอบเขตของแรงที่เซอร์โวสามารถทนได้เรียกว่าอัตราแรงบิด สิ่งสําคัญคือต้องทราบว่าเซอร์โวไม่ได้รักษาตําแหน่งไว้อย่างไม่มีกําหนด จําเป็นต้องมีการทําซ้ําของพัลส์ตําแหน่งเพื่อสั่งให้เซอร์โวอยู่ในตําแหน่งที่กําหนด
การเชื่อมต่อเซอร์โวมอเตอร์กับไมโครคอนโทรลเลอร์
ในการควบคุมเซอร์โวมอเตอร์จําเป็นต้องเชื่อมต่อกับไมโครคอนโทรลเลอร์ซึ่งทําหน้าที่เป็นสมองของระบบ มีหลายวิธีในการเชื่อมต่อเซอร์โวมอเตอร์กับไมโครคอนโทรลเลอร์ วิธีหนึ่งที่พบบ่อยคือการใช้การมอดูเลตความกว้างพัลส์ (PWM) PWM ทํางานโดยเปลี่ยนความกว้างของสัญญาณพัลส์เพื่อควบคุมตําแหน่งของเซอร์โวมอเตอร์ ไมโครคอนโทรลเลอร์สร้างสัญญาณ PWM ซึ่งจะถูกส่งไปยังเซอร์โวมอเตอร์ ด้วยการเปลี่ยนความกว้างของพัลส์ไมโครคอนโทรลเลอร์สามารถควบคุมมุมที่เซอร์โวมอเตอร์หมุนได้ ในการเชื่อมต่อเซอร์โวมอเตอร์กับไมโครคอนโทรลเลอร์คุณจะต้องเชื่อมต่อเซอร์โวมอเตอร์กับพินที่เหมาะสมของไมโครคอนโทรลเลอร์
เซอร์โวมอเตอร์มีสามสาย:
- พลัง
- พื้นดิน
- สัญญาณ
สายไฟและสายกราวด์เชื่อมต่อกับแหล่งพลังงาน ในขณะที่สายสัญญาณเชื่อมต่อกับพิน PWM บนไมโครคอนโทรลเลอร์ เมื่อทําการเชื่อมต่อฮาร์ดแวร์แล้ว คุณสามารถเริ่มตั้งโปรแกรมไมโครคอนโทรลเลอร์เพื่อควบคุมเซอร์โวมอเตอร์ได้ สิ่งนี้เกี่ยวข้องกับการเขียนโค้ดที่สร้างสัญญาณ PWM ด้วยความกว้างพัลส์ที่ต้องการ ไมโครคอนโทรลเลอร์จะส่งสัญญาณ PWM ไปยังเซอร์โวมอเตอร์อย่างต่อเนื่อง ทําให้หมุนไปยังมุมที่ต้องการ สิ่งสําคัญคือต้องสังเกตว่าเซอร์โวมอเตอร์ที่แตกต่างกันอาจมีลักษณะการทํางานที่แตกต่างกัน เช่น ช่วงของมุมที่สามารถหมุนได้หรือความเร็วที่สามารถเคลื่อนที่ได้ ดังนั้นจึงจําเป็นอย่างยิ่งที่จะต้องศึกษาเอกสารข้อมูลหรือข้อมูลจําเพาะของเซอร์โวมอเตอร์เพื่อให้แน่ใจว่ามีการเชื่อมต่อและการควบคุมที่เหมาะสม
การประยุกต์ใช้เซอร์โวมอเตอร์
เซอร์โวมอเตอร์มีการใช้งานที่หลากหลายในอุตสาหกรรมต่างๆ มาสํารวจการใช้งานทั่วไปของเซอร์โวมอเตอร์กัน:
- หุ่นยนต์: เซอร์โวมอเตอร์ใช้ในแขนหุ่นยนต์ กริปเปอร์ และข้อต่อเพื่อให้ได้ตําแหน่งที่แม่นยําและการเคลื่อนไหวที่ราบรื่น สิ่งนี้ทําให้หุ่นยนต์สามารถทํางานได้อย่างแม่นยํา เช่น การประกอบ การเชื่อม และการจัดการวัสดุ
- เครื่อง CNC: เซอร์โวมอเตอร์ใช้กันอย่างแพร่หลายในเครื่องควบคุมเชิงตัวเลขด้วยคอมพิวเตอร์ (CNC) ควบคุมการเคลื่อนที่ของเครื่องมือตัด ทําให้มั่นใจได้ถึงการตัดเฉือนที่แม่นยําและสม่ําเสมอ เซอร์โวมอเตอร์ช่วยให้สามารถวางตําแหน่งด้วยความเร็วสูงและควบคุมกระบวนการตัดได้อย่างแม่นยําส่งผลให้มีคุณภาพและผลผลิตที่เหนือกว่า
- ระบบอัตโนมัติทางอุตสาหกรรม: ใช้ในสายพานลําเลียง เครื่องบรรจุภัณฑ์ แท่นพิมพ์ และอุปกรณ์อัตโนมัติอื่นๆ การควบคุมที่แม่นยําของเซอร์โวมอเตอร์ช่วยให้มั่นใจได้ถึงการทํางานที่มีประสิทธิภาพและเชื่อถือได้ปรับปรุงผลผลิตและลดเวลาหยุดทํางาน
- การบินและอวกาศและการป้องกันประเทศ: เซอร์โวมอเตอร์ใช้ในพื้นผิวควบคุมอากาศยาน ระบบนําทางขีปนาวุธ และอากาศยานไร้คนขับ (UAV) ความแม่นยําและการตอบสนองสูงของเซอร์โวมอเตอร์ช่วยให้สามารถควบคุมพื้นผิวการบินและกลไกการนําทางได้อย่างแม่นยํา
- อิเล็กทรอนิกส์: เซอร์โวมักใช้ในอุปกรณ์อิเล็กทรอนิกส์ เช่น กล้อง ซึ่งช่วยในการโฟกัสอัตโนมัติและระบบป้องกันภาพสั่นไหว นอกจากนี้ยังพบในอุปกรณ์อิเล็กทรอนิกส์สําหรับผู้บริโภค เช่น เครื่องเล่นดีวีดีและระบบอัตโนมัติภายในบ้าน
- พลังงานหมุนเวียน: เซอร์โวมอเตอร์ใช้ในระบบติดตามพลังงานแสงอาทิตย์เพื่อปรับตําแหน่งของแผงโซลาร์เซลล์ปรับทิศทางให้เหมาะสมกับดวงอาทิตย์เพื่อเพิ่มการดักจับพลังงาน
ข้อดีและข้อเสียของเซอร์โวมอเตอร์
ในที่นี้ เราจะพูดถึงข้อดีและข้อเสียของเซอร์โวมอเตอร์ ช่วยให้คุณเข้าใจความสามารถและข้อจํากัดของเซอร์โวมอเตอร์:
ข้อดีของเซอร์โวมอเตอร์
เซอร์โวมอเตอร์เป็นมอเตอร์ที่มีประสิทธิภาพสูงและหลากหลายซึ่งมีข้อดีหลายประการ นี่คือประโยชน์หลักบางประการ:
- การควบคุมที่แม่นยํา: เซอร์โวมอเตอร์ให้การควบคุมตําแหน่ง ความเร็ว และแรงบิดที่แม่นยํา ทําให้เหมาะสําหรับการใช้งานที่ต้องการความแม่นยําสูงและความสามารถในการทําซ้ํา
- แรงบิดสูง: เซอร์โวมอเตอร์สามารถให้แรงบิดสูงแม้ในความเร็วต่ํา จึงเหมาะสําหรับงานที่ต้องใช้แรงและกําลังสูง
- การตอบสนองที่รวดเร็ว: เซอร์โวมอเตอร์มีเวลาตอบสนองที่รวดเร็ว ช่วยให้สามารถปรับให้เข้ากับการเปลี่ยนแปลงของโหลดหรือความเร็วได้อย่างรวดเร็ว
- ช่วงความเร็วกว้าง: เซอร์โวมอเตอร์สามารถทํางานได้ด้วยความเร็วที่หลากหลาย ตั้งแต่ต่ํามากไปจนถึงสูงมาก ทําให้ใช้งานได้หลากหลายสําหรับการใช้งานที่หลากหลาย
- ประสิทธิภาพการใช้พลังงาน: เซอร์โวมอเตอร์ได้รับการออกแบบมาให้ประหยัดพลังงาน ใช้พลังงานน้อยลงเมื่อไม่ใช้งาน และลดต้นทุนด้านพลังงานโดยรวม
ข้อเสียของเซอร์โวมอเตอร์
แม้ว่าเซอร์โวมอเตอร์จะมีข้อดีหลายประการ แต่ก็มีข้อเสียบางประการที่ต้องพิจารณา:
- การควบคุมที่ซับซ้อน: เซอร์โวมอเตอร์ต้องการระบบควบคุมที่ซับซ้อนและกลไกป้อนกลับ เช่น Bode Plots ในระบบควบคุมซึ่งสามารถเพิ่มความซับซ้อนและต้นทุนโดยรวมของระบบได้
- ต้นทุนที่สูงขึ้น: เมื่อเทียบกับมอเตอร์ประเภทอื่นๆ เซอร์โวมอเตอร์มักจะมีราคาแพงกว่าเนื่องจากคุณสมบัติขั้นสูงและการควบคุมที่แม่นยํา
- ขนาดและน้ําหนัก: โดยทั่วไปแล้วเซอร์โวมอเตอร์จะมีขนาดใหญ่และหนักกว่ามอเตอร์ประเภทอื่นๆ ซึ่งอาจจํากัดการใช้งานในการใช้งานบางอย่างที่มีข้อจํากัดด้านพื้นที่
- การสร้างความร้อน: เซอร์โวมอเตอร์สามารถสร้างความร้อนได้มากระหว่างการทํางาน ซึ่งต้องใช้มาตรการทําความเย็นเพิ่มเติมเพื่อป้องกันความร้อนสูงเกินไป
- เสียงรบกวน: ขึ้นอยู่กับการออกแบบและคุณภาพของเซอร์โวมอเตอร์ อาจสร้างเสียงรบกวนระหว่างการทํางาน ซึ่งอาจเป็นปัญหาในสภาพแวดล้อมที่ไวต่อเสียงรบกวน
สรุป
โดยสรุป เซอร์โวมอเตอร์เป็นขุมพลังที่มีความแม่นยําของวิศวกรรมไฟฟ้า ช่วยให้สามารถควบคุมได้อย่างแม่นยําและการวางตําแหน่งที่แม่นยําในการใช้งานที่หลากหลาย ความสามารถในการมอบความแม่นยําที่ยอดเยี่ยมอัตราส่วนแรงบิดต่อความเฉื่อยสูงเวลาตอบสนองที่รวดเร็วและความสามารถในการตั้งโปรแกรมทําให้ขาดไม่ได้ในอุตสาหกรรมต่างๆเช่นหุ่นยนต์การบินและอวกาศและการผลิต ในขณะที่เทคโนโลยีก้าวหน้าอย่างต่อเนื่องเซอร์โวมอเตอร์จะมีบทบาทสําคัญมากยิ่งขึ้นในการกําหนดอนาคตของวิศวกรรมไฟฟ้าอย่างไม่ต้องสงสัย



ผลิตภัณฑ์
February 2, 2026
เซอร์โวมอเตอร์
ปลดล็อกกลไกของเซอร์โวมอเตอร์และดูว่ามันเปลี่ยนสัญญาณไฟฟ้าธรรมดาให้เป็นการเคลื่อนไหวที่ควบคุมได้อย่างสมบูรณ์แบบได้อย่างไร
by
นักเขียนบทความ

