
ผลิตภัณฑ์
19
Jan
การสร้างระบบการมองเห็นสำหรับหุ่นยนต์ประสิทธิภาพสูงด้วย GMSL
ปลดล็อกความเร็วในการมองเห็นของหุ่นยนต์ชั้นยอดโดยเชี่ยวชาญการเชื่อมต่อ GMSL ในการออกแบบครั้งต่อไปของคุณ
บทคัดย่อ
ระบบหุ่นยนต์พึ่งพาการมองเห็นมากขึ้นในการรับรู้และโต้ตอบกับสภาพแวดล้อมทําให้เกิดความต้องการที่เพิ่มขึ้นสําหรับลิงก์ข้อมูลความเร็วสูงและเวลาแฝงต่ํา Gigabit Multimedia Serial Link (GMSL TM) นําเสนอโซลูชันที่มีแนวโน้มโดยการส่งสัญญาณวิดีโอ สัญญาณควบคุม และจ่ายไฟผ่านสายเคเบิลเส้นเดียวที่มีความน่าเชื่อถือสูง บทความนี้จะพิจารณาว่ากล้องถูกนําไปใช้ในวิทยาการหุ่นยนต์อย่างไร ความท้าทายในการเชื่อมต่อที่พวกเขาเผชิญ และวิธีที่ GMSL สามารถเปิดใช้งานแพลตฟอร์มหุ่นยนต์ที่ปรับขนาดได้ แข็งแกร่ง และขับเคลื่อนด้วยประสิทธิภาพ
บทนํา
ระบบหุ่นยนต์ต้องพึ่งพาแมชชีนวิชันขั้นสูงมากขึ้นในการรับรู้ นําทาง และโต้ตอบกับสภาพแวดล้อม ความต้องการลิงก์ความเร็วสูงและเวลาแฝงต่ําที่สามารถส่งและรวบรวมข้อมูลวิดีโอแบบเรียลไทม์ได้ไม่เคยมีมากเท่านี้มาก่อน
Gigabit Multimedia Serial Link (GMSL™) ซึ่งเดิมพัฒนาขึ้นสําหรับการใช้งานในยานยนต์ กําลังกลายเป็นโซลูชันที่ทรงพลังและมีประสิทธิภาพสําหรับระบบหุ่นยนต์ GMSL ส่งข้อมูลวิดีโอความเร็วสูง สัญญาณควบคุมแบบสองทิศทาง และจ่ายไฟผ่านสายเคเบิลเส้นเดียว ให้การเข้าถึงสายเคเบิลที่ยาว เวลาแฝงระดับไมโครวินาทีที่กําหนดได้พร้อมอัตราความผิดพลาดบิต (BER) ที่ต่ํามาก ช่วยลดความยุ่งยากของชุดสายไฟและลดรอยเท้าของโซลูชันทั้งหมด เหมาะอย่างยิ่งสําหรับหุ่นยนต์ที่เน้นการมองเห็นที่ทํางานในสภาพแวดล้อมแบบไดนามิกและมักรุนแรง
ส่วนต่อไปนี้จะกล่าวถึงสถานที่และวิธีการใช้กล้องในวิทยาการหุ่นยนต์ความท้าทายด้านข้อมูลและการเชื่อมต่อที่แอปพลิเคชันเหล่านี้ต้องเผชิญและวิธีที่ GMSL สามารถช่วยนักออกแบบระบบสร้างแพลตฟอร์มหุ่นยนต์ที่ปรับขนาดได้เชื่อถือได้และมีประสิทธิภาพสูง
กล้องใช้ในวิทยาการหุ่นยนต์ที่ไหน?
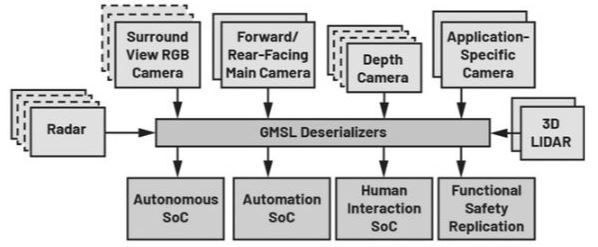
กล้องเป็นหัวใจสําคัญของการรับรู้ของหุ่นยนต์สมัยใหม่ ทําให้เครื่องจักรสามารถเข้าใจและตอบสนองต่อสภาพแวดล้อมได้แบบเรียลไทม์ ไม่ว่าจะเป็นหุ่นยนต์คลังสินค้าที่นําทางทางเดินแขนหุ่นยนต์คัดแยกพัสดุหรือหุ่นยนต์บริการที่มีปฏิสัมพันธ์กับผู้คนระบบการมองเห็นมีความสําคัญต่อความเป็นอิสระระบบอัตโนมัติและการโต้ตอบ กล้องเหล่านี้ไม่เพียงแต่มีความหลากหลายในด้านฟังก์ชัน แต่ยังมีรูปแบบ โดยติดตั้งบนส่วนต่างๆ ของหุ่นยนต์ขึ้นอยู่กับงาน และปรับให้เหมาะกับข้อจํากัดทางกายภาพและการปฏิบัติงานของแพลตฟอร์ม (ดูรูปที่ 1)
เอกราช
ในหุ่นยนต์อัตโนมัติกล้องทําหน้าที่เป็นดวงตาของเครื่องจักรทําให้สามารถรับรู้สภาพแวดล้อมหลีกเลี่ยงสิ่งกีดขวางและแปลตัวเองภายในสภาพแวดล้อม สําหรับหุ่นยนต์เคลื่อนที่ เช่น หุ่นยนต์ส่งของ รถรับส่งคลังสินค้า หรือรถสํารวจทางการเกษตร มักเกี่ยวข้องกับการรวมกันของกล้องมุมมองกว้างที่วางไว้ที่มุมหรือขอบของหุ่นยนต์ ระบบมองภาพรอบทิศทางเหล่านี้ให้การรับรู้แบบ 360° ช่วยให้หุ่นยนต์นําทางในพื้นที่ที่ซับซ้อนโดยไม่เกิดการชนกัน
แอปพลิเคชันที่เกี่ยวข้องกับความเป็นอิสระอื่นๆ ใช้กล้องคว่ําลงหรือขึ้นเพื่ออ่านเครื่องหมาย fiducial บนพื้น เพดาน หรือผนัง เครื่องหมายเหล่านี้ทําหน้าที่เป็นป้ายบอกทางที่มองเห็นได้ ช่วยให้หุ่นยนต์สามารถปรับตําแหน่งใหม่หรือกระตุ้นการกระทําเฉพาะขณะเคลื่อนที่ผ่านสภาพแวดล้อมที่มีโครงสร้าง เช่น โรงงานหรือโรงพยาบาล ในระบบขั้นสูงกล้องสเตอริโอวิชั่นหรือกล้องเวลาบิน (ToF) จะถูกวางไว้ที่ด้านหน้าหรือด้านข้างของหุ่นยนต์เพื่อสร้างแผนที่สามมิติประมาณระยะทางและช่วยในการแปลและทําแผนที่พร้อมกัน (SLAM)
ตําแหน่งของกล้องเหล่านี้มักถูกกําหนดโดยขนาด ความคล่องตัว และขอบเขตการมองเห็นที่ต้องการของหุ่นยนต์ ตัวอย่างเช่น สําหรับหุ่นยนต์ส่งของบนทางเท้าขนาดเล็ก กล้องอาจซ่อนอยู่ในแผงปิดภาคเรียนทั้งสี่ด้าน บนโดรน โดยทั่วไปแล้วจะหันหน้าไปทางด้านหน้าเพื่อการนําทาง และหันหน้าลงเพื่อลงจอดหรือติดตามวัตถุ
ระบบอัตโนมัติ
ในระบบอัตโนมัติทางอุตสาหกรรม ระบบการมองเห็นช่วยให้หุ่นยนต์ทํางานซ้ําๆ หรือแม่นยําด้วยความเร็วและความสม่ําเสมอ ที่นี่ กล้องอาจติดตั้งบนแขนหุ่นยนต์ ถัดจากกริปเปอร์หรือเอ็นเอฟเฟกต์ และระบบสามารถตรวจสอบ ระบุตําแหน่ง และจัดการวัตถุด้วยสายตาด้วยความแม่นยําสูง นี่เป็นสิ่งสําคัญอย่างยิ่งในการดําเนินการหยิบและวาง ซึ่งการระบุตําแหน่งและการวางแนวที่แน่นอนของชิ้นส่วนหรือบรรจุภัณฑ์เป็นสิ่งสําคัญ
ในบางครั้ง กล้องจะติดตั้งอยู่เหนือพื้นที่ทํางาน ซึ่งติดตั้งบนโครงสําหรับตั้งสิ่งของหรือรางเหนือศีรษะ เพื่อตรวจสอบสิ่งของบนสายพานลําเลียงหรือสแกนบาร์โค้ด ในสภาพแวดล้อมของคลังสินค้า หุ่นยนต์เคลื่อนที่ใช้กล้องที่หันหน้าไปทางด้านหน้าเพื่อตรวจจับฉลากชั้นวาง ป้าย หรือรหัส QR ทําให้สามารถมอบหมายงานแบบไดนามิกหรือเปลี่ยนแปลงเส้นทางได้
หุ่นยนต์ตรวจสอบบางรุ่น โดยเฉพาะอย่างยิ่งหุ่นยนต์ที่ใช้ในโครงสร้างพื้นฐาน สาธารณูปโภค หรืออุตสาหกรรมหนัก มีกล้องที่สามารถซูมได้ซึ่งติดตั้งบนเสาหรือแขนประกบ สิ่งเหล่านี้ช่วยให้สามารถจับภาพความละเอียดสูงของตะเข็บเชื่อม ถาดสายเคเบิล หรือข้อต่อท่อ ซึ่งเป็นงานที่อาจเป็นอันตรายหรือใช้เวลานานสําหรับมนุษย์ในการทํางานด้วยตนเอง
ปฏิสัมพันธ์ของมนุษย์
กล้องยังมีบทบาทสําคัญในการมีส่วนร่วมของหุ่นยนต์กับมนุษย์ ในอุตสาหกรรมการผลิต การดูแลสุขภาพ หรือการบริการร่วมกัน หุ่นยนต์จําเป็นต้องเข้าใจท่าทาง จดจําใบหน้า และรักษาความรู้สึกของตัวตนทางสังคม ระบบการมองเห็นทําให้สิ่งนี้เป็นไปได้
หุ่นยนต์ฮิวแมนนอยด์และหุ่นยนต์บริการมักมีกล้องฝังอยู่ในศีรษะหรือหน้าอก โดยเลียนแบบแนวสายตาของมนุษย์เพื่อให้มีปฏิสัมพันธ์ตามธรรมชาติ กล้องเหล่านี้ช่วยให้หุ่นยนต์ตีความการแสดงออกทางสีหน้า สบตา หรือติดตามการจ้องมองของบุคคล บางระบบใช้กล้องความลึกหรือเลนส์ฟิชอายเพื่อติดตามการเคลื่อนไหวของร่างกายหรือตรวจจับเมื่อมีคนเข้ามาในพื้นที่ทํางานที่ใช้ร่วมกัน
ในสถานการณ์หุ่นยนต์ร่วมปฏิบัติงาน (โคบอท) ที่มนุษย์และเครื่องจักรทํางานเคียงข้างกัน จะใช้แมชชีนวิชันเพื่อความปลอดภัยและการตอบสนอง หุ่นยนต์อาจเฝ้าดูแขนขาหรือเครื่องมือที่เข้าใกล้ ปรับพฤติกรรมเพื่อหลีกเลี่ยงการชนกัน หรือหยุดงานชั่วคราวหากมีคนเข้าใกล้เกินไป
แม้แต่ในระบบควบคุมทางไกลหรือกึ่งอัตโนมัติ แมชชีนวิชั่นก็ยังคงเป็นกุญแจสําคัญ กล้องที่ติดตั้งด้านหน้าสตรีมวิดีโอสดไปยังผู้ปฏิบัติงานระยะไกล ทําให้สามารถควบคุมหรือตรวจสอบได้แบบเรียลไทม์ สามารถเพิ่มภาพซ้อนทับความเป็นจริงเสริมลงในฟีดวิดีโอนี้เพื่อช่วยในการทํางานต่างๆ เช่น การวินิจฉัยหรือการฝึกอบรมจากระยะไกล
ในโดเมนเหล่านี้ การจัดวางของกล้อง ไม่ว่าจะเป็นบนกริปเปอร์ gimbal ฐาน หรือส่วนหัวของหุ่นยนต์ เป็นการตัดสินใจในการออกแบบที่เชื่อมโยงกับฟังก์ชัน ฟอร์มแฟคเตอร์ และสภาพแวดล้อมของหุ่นยนต์ เมื่อระบบหุ่นยนต์มีความสามารถและเป็นอิสระมากขึ้นบทบาทของการมองเห็นจะลึกซึ้งยิ่งขึ้นและการรวมกล้องจะมีความซับซ้อนและจําเป็นมากยิ่งขึ้น
ความท้าทายด้านวิสัยทัศน์ของหุ่นยนต์
เมื่อระบบการมองเห็นกลายเป็นกระดูกสันหลังของปัญญาหุ่นยนต์โอกาสและความซับซ้อนก็เติบโตควบคู่ไปด้วย กล้องประสิทธิภาพสูงปลดล็อกความสามารถอันทรงพลัง ทําให้สามารถรับรู้แบบเรียลไทม์ การจัดการที่แม่นยํา และการโต้ตอบกับมนุษย์ที่ปลอดภัยยิ่งขึ้น แต่ก็มีความต้องการสถาปัตยกรรมระบบเพิ่มขึ้นเช่นกัน ไม่ใช่แค่การย้ายข้อมูลวิดีโอจํานวนมากอย่างรวดเร็วอีกต่อไป หุ่นยนต์จํานวนมากในปัจจุบันต้องตัดสินใจในเสี้ยววินาทีโดยพิจารณาจากอินพุตเซ็นเซอร์หลายรูปแบบ ทั้งหมดนี้ในขณะที่ทํางานภายในซองจดหมายเชิงกลที่แน่นหนา จัดการข้อจํากัดด้านพลังงาน
ความท้าทายเหล่านี้ประกอบกับสภาพแวดล้อมที่หุ่นยนต์ต้องเผชิญ หุ่นยนต์คลังสินค้าอาจรับส่งเข้าและออกจากช่องแช่แข็ง ทนต่ออุณหภูมิที่แปรปรวนอย่างกะทันหันและการควบแน่น รถสํารวจเพื่อการเกษตรอาจคลานข้ามทุ่งนาที่ไม่ได้ปู ดูดซับแรงสั่นสะเทือนและแรงกระแทกทางกลอย่างต่อเนื่อง หุ่นยนต์บริการในโรงพยาบาลหรือพื้นที่สาธารณะอาจพบกับสภาพแวดล้อมที่ไม่คุ้นเคยและซับซ้อนทางสายตา ซึ่งหุ่นยนต์ต้องปรับตัวอย่างรวดเร็วเพื่อนําทางรอบผู้คนและสิ่งกีดขวางอย่างปลอดภัย
แก้ปัญหาความท้าทายด้วย GMSL
GMSL อยู่ในตําแหน่งที่ไม่เหมือนใครเพื่อตอบสนองความต้องการของระบบหุ่นยนต์สมัยใหม่การผสมผสานระหว่างแบนด์วิดท์ ความทนทาน และความยืดหยุ่นในการผสานรวมทําให้เหมาะอย่างยิ่งสําหรับแพลตฟอร์มที่มีเซ็นเซอร์มากมายซึ่งทํางานในสภาพแวดล้อมแบบไดนามิกและมีความสําคัญต่อภารกิจคุณสมบัติต่อไปนี้เน้นว่า GMSL จัดการกับความท้าทายที่เกี่ยวข้องกับการมองเห็นที่สําคัญในวิทยาการหุ่นยนต์ได้อย่างไร
อัตราข้อมูลสูงและเวลาแฝงต่ํา
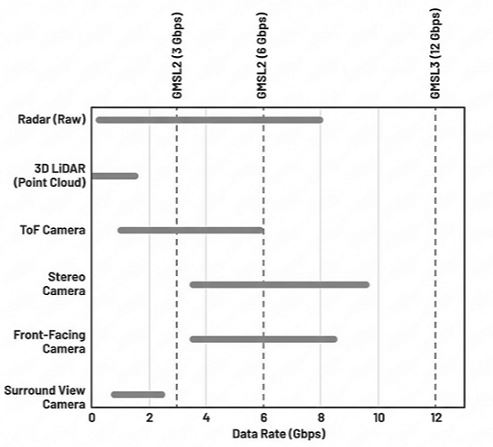
ตระกูลผลิตภัณฑ์ GMSL2™ และ GMSL3™ รองรับอัตราข้อมูลช่องสัญญาณไปข้างหน้า (เส้นทางวิดีโอ) ที่ 3 Gbps, 6 Gbps และ 12 Gbps ซึ่งครอบคลุมกรณีการใช้งานการมองเห็นด้วยหุ่นยนต์ที่หลากหลายอัตราการเชื่อมโยงที่ยืดหยุ่นเหล่านี้ช่วยให้นักออกแบบระบบสามารถปรับความละเอียด อัตราเฟรม ประเภทเซ็นเซอร์ และข้อกําหนดในการประมวลผลให้เหมาะสม (รูปที่ 2)
ลิงก์ 3 Gbps เพียงพอสําหรับกล้องมองภาพรอบทิศทางส่วนใหญ่โดยใช้เซ็นเซอร์โรลลิ่งชัตเตอร์ 2 MP ถึง 3 MP ที่ 60 เฟรมต่อวินาที (FPS)นอกจากนี้ยังรองรับรูปแบบการตรวจจับทั่วไปอื่นๆ เช่น เซ็นเซอร์ ToF และหน่วยตรวจจับและวัดระยะแสง (LIDAR) พร้อมเอาต์พุตพอยต์คลาวด์และเซ็นเซอร์เรดาร์ที่ส่งข้อมูลการตรวจจับหรือการบีบอัดผลตอบแทนเหมือนภาพ
โดยทั่วไปแล้วโหมด 6 Gbps จะใช้สําหรับกล้องหันหน้าหลักของหุ่นยนต์ ซึ่งต้องใช้เซ็นเซอร์ความละเอียดสูงกว่า (โดยปกติคือ 8 MP ขึ้นไป) สําหรับการตรวจจับวัตถุอัตราข้อมูลนี้ยังรองรับเซ็นเซอร์ ToF ที่มีเอาต์พุตดิบ หรือระบบการมองเห็นสเตอริโอที่สตรีมเอาต์พุตดิบจากเซ็นเซอร์ภาพสองตัวหรือส่งออกสตรีมพอยต์คลาวด์ที่ประมวลผลจากตัวประมวลผลสัญญาณภาพ (ISP) ในตัวกล้องสเตอริโอที่มีจําหน่ายทั่วไปจํานวนมากในปัจจุบันพึ่งพาอัตราข้อมูลนี้เพื่อประสิทธิภาพอัตราเฟรมสูง
ในระดับไฮเอนด์ ลิงก์ 12 Gbps ช่วยให้รองรับกล้องความละเอียด 12 MP หรือสูงกว่าที่ใช้ในแอปพลิเคชันหุ่นยนต์เฉพาะทางที่ต้องการการจําแนกวัตถุขั้นสูงการแบ่งส่วนฉาก หรือการรับรู้ระยะไกล ที่น่าสนใจคือแม้แต่เซ็นเซอร์ชัตเตอร์ทั่วโลกที่มีความละเอียดต่ําบางตัวก็ยังต้องการลิงก์ความเร็วที่สูงขึ้นเพื่อลดเวลาในการอ่านข้อมูลและหลีกเลี่ยงสิ่งประดิษฐ์จากการเคลื่อนไหวระหว่างรอบการจับภาพที่รวดเร็ว ซึ่งมีความสําคัญอย่างยิ่งในสภาพแวดล้อมแบบไดนามิกหรือความเร็วสูง
เนื่องจาก GMSL ใช้การดูเพล็กซ์โดเมนความถี่เพื่อแยกช่องสัญญาณไปข้างหน้า (วิดีโอและการควบคุม) และย้อนกลับ (ควบคุม) จึงช่วยให้สามารถสื่อสารแบบสองทิศทางด้วยเวลาแฝงต่ําและกําหนดได้โดยไม่เสี่ยงต่อการชนกันของข้อมูลในอัตราการเชื่อมโยงทั้งหมด GMSL รักษาเวลาแฝงต่ําอย่างน่าประทับใจ: ความล่าช้าที่เพิ่มขึ้นจากอินพุตของซีเรียลไลเซอร์ GMSL ไปยังเอาต์พุตของตัวแยกสัญญาณโดยทั่วไปจะอยู่ที่สิบไมโครวินาทีที่ต่ํากว่าซึ่งเล็กน้อยสําหรับระบบการมองเห็นของหุ่นยนต์แบบเรียลไทม์ส่วนใหญ่เวลาแฝงของช่องสัญญาณย้อนกลับที่กําหนดได้ช่วยให้สามารถทริกเกอร์ฮาร์ดแวร์ได้อย่างแม่นยําจากโฮสต์ไปยังกล้องซึ่งมีความสําคัญต่อการจับภาพแบบซิงโครไนซ์ในเซ็นเซอร์หลายตัวรวมถึงการทริกเกอร์เฟรมที่ขับเคลื่อนด้วยเหตุการณ์ที่ไวต่อเวลาในเวิร์กโฟลว์หุ่นยนต์ที่ซับซ้อนการบรรลุความแม่นยําในการจับเวลาในระดับนี้ด้วยกล้อง USB หรืออีเทอร์เน็ตโดยทั่วไปจะต้องเพิ่มสายทริกเกอร์ฮาร์ดแวร์แยกต่างหากเพิ่มความซับซ้อนของระบบและค่าใช้จ่ายในการเดินสาย
รอยเท้าขนาดเล็กและใช้พลังงานต่ํา
หนึ่งในข้อเสนอคุณค่าที่สําคัญของ GMSL คือความสามารถในการลดโครงสร้างพื้นฐานของสายเคเบิลและตัวเชื่อมต่อ GMSL เองเป็นลิงค์ฟูลดูเพล็กซ์ และกล้อง GMSL ส่วนใหญ่ใช้คุณสมบัติ power-over-coax (PoC) ทําให้สามารถส่งข้อมูลวิดีโอ สัญญาณควบคุมแบบสองทิศทาง และพลังงานผ่านสายโคแอกเชียลเส้นเดียวลดน้ําหนักโดยรวมและมัดสายไฟจํานวนมาก และทําให้การกําหนดเส้นทางเชิงกลในแพลตฟอร์มหุ่นยนต์ขนาดกะทัดรัดหรือแบบประกบง่ายขึ้น (รูปที่ 3)
นอกจากนี้ GMSL serializer ยังเป็นอุปกรณ์แบบบูรณาการสูงที่รวมอินเทอร์เฟซวิดีโอ (เช่น MIPI-CSI) และ GMSL PHY ไว้ในชิปตัวเดียวการใช้พลังงานของซีเรียลไลเซอร์ GMSL โดยทั่วไปจะอยู่ที่ประมาณ 260 mW ในโหมด 6 Gbps นั้นต่ํามากเมื่อเทียบกับเทคโนโลยีทางเลือกที่มีปริมาณข้อมูลใกล้เคียงกันคุณสมบัติทั้งหมดเหล่านี้จะแปลเป็นพื้นที่บอร์ดที่เล็กลง ลดความต้องการในการจัดการความร้อน (มักจะไม่จําเป็นต้องใช้ฮีทซิงค์ขนาดใหญ่) และประสิทธิภาพของระบบโดยรวมที่มากขึ้น โดยเฉพาะอย่างยิ่งสําหรับหุ่นยนต์ที่ใช้พลังงานจากแบตเตอรี่

การรวมเซ็นเซอร์และการกําหนดเส้นทางข้อมูลวิดีโอ
ตัวแยกสัญญาณ GMSL มีให้เลือกหลายแบบ รองรับลิงก์อินพุตหนึ่ง สอง หรือสี่ลิงก์ ทําให้สามารถสร้างสถาปัตยกรรมการรวมเซ็นเซอร์ได้อย่างยืดหยุ่นสิ่งนี้ช่วยให้นักออกแบบสามารถเชื่อมต่อกล้องหรือโมดูลเซ็นเซอร์หลายตัวเข้ากับหน่วยประมวลผลเดียวโดยไม่ต้องสลับเพิ่มเติมหรือ muxing ภายนอก ซึ่งมีประโยชน์อย่างยิ่งในระบบหุ่นยนต์หลายกล้อง
นอกจากอินพุตหลายรายการแล้ว GMSL SERDES ยังรองรับคุณสมบัติขั้นสูงในการจัดการและกําหนดเส้นทางข้อมูลอย่างชาญฉลาดทั่วทั้งระบบซึ่งรวมถึง:
- I2C และ GPIO ออกอากาศสําหรับการกําหนดค่าเซ็นเซอร์พร้อมกัน และการซิงโครไนซ์เฟรม
- I2C นามแฝงที่อยู่เพื่อหลีกเลี่ยงความขัดแย้งของที่อยู่ I2C ในการส่งผ่าน โหมด
- การกําหนดช่องสัญญาณเสมือนใหม่ทําให้สามารถแมปสตรีมวิดีโอหลายรายการเข้ากับบัฟเฟอร์เฟรมภายในระบบบนชิป (SoC) ได้อย่างหมดจด
- การทําสําเนาสตรีมวิดีโอและการกรองช่องสัญญาณเสมือน ทําให้สามารถส่งข้อมูลวิดีโอที่เลือกไปยัง SoC หลายตัวได้ เช่น เพื่อรองรับทั้งระบบอัตโนมัติและไปป์ไลน์การโต้ตอบจากฟีดกล้องเดียวกัน หรือเพื่อรองรับเส้นทางการประมวลผลที่ซ้ําซ้อนเพื่อเพิ่มความปลอดภัยในการทํางาน
ความปลอดภัยและความน่าเชื่อถือ
เดิมทีพัฒนาขึ้นสําหรับการใช้งานระบบช่วยเหลือผู้ขับขี่ขั้นสูง (ADAS) ในยานยนต์ GMSL ได้รับการพิสูจน์แล้วในสภาพแวดล้อมที่ความปลอดภัย ความน่าเชื่อถือ และความทนทานไม่สามารถต่อรองได้ระบบหุ่นยนต์ โดยเฉพาะอย่างยิ่งระบบที่ทํางานรอบตัวผู้คนหรือปฏิบัติงานทางอุตสาหกรรมที่สําคัญต่อภารกิจ จะได้รับประโยชน์จากมาตรฐานระดับสูงเช่นเดียวกัน

ซีเรียลไลเซอร์และตัวแยกส่วนย่อย GMSL ส่วนใหญ่มีคุณสมบัติในการทํางานในช่วงอุณหภูมิ –40°C ถึง +105°C พร้อมอีควอไลเซอร์แบบปรับได้ในตัวที่ตรวจสอบและปรับการตั้งค่าตัวรับส่งสัญญาณอย่างต่อเนื่องเพื่อตอบสนองต่อการเปลี่ยนแปลงของสิ่งแวดล้อมสิ่งนี้ทําให้สถาปนิกระบบมีความยืดหยุ่นในการออกแบบหุ่นยนต์ที่ทํางานได้อย่างน่าเชื่อถือในสภาวะอุณหภูมิที่รุนแรงหรือผันผวน
นอกจากนี้ อุปกรณ์ GMSL ส่วนใหญ่ยังเป็นไปตามมาตรฐาน ASIL-B และแสดง BER ที่ต่ํามากภายใต้เงื่อนไขการเชื่อมโยงที่สอดคล้องกัน GMSL2 มี BER ทั่วไปที่ 10–15 ในขณะที่ GMSL3 ที่มีการแก้ไขข้อผิดพลาดไปข้างหน้า (FEC) ที่จําเป็นสามารถเข้าถึง BER ได้ต่ําถึง 10–30 ความสมบูรณ์ของข้อมูลที่ยอดเยี่ยมนี้รวมกับการรับรองความปลอดภัยช่วยลดความยุ่งยากในการรวมความปลอดภัยในการทํางานระดับระบบได้อย่างมาก
ท้ายที่สุดแล้ว ความทนทานของ GMSL นําไปสู่การลดเวลาหยุดทํางาน ต้นทุนการบํารุงรักษาที่ลดลง และความมั่นใจที่มากขึ้นในความน่าเชื่อถือของระบบในระยะยาว ซึ่งเป็นข้อได้เปรียบที่สําคัญในการปรับใช้หุ่นยนต์ทั้งในอุตสาหกรรมและหุ่นยนต์บริการ
ระบบนิเวศที่ครบถ้วน
GMSL ได้รับประโยชน์จากระบบนิเวศที่ครบถ้วนและพร้อมสําหรับการปรับใช้ ซึ่งเกิดจากการใช้งานในระบบยานยนต์ในปริมาณมากเป็นเวลาหลายปี และได้รับการสนับสนุนจากเครือข่ายพันธมิตรระบบนิเวศระดับโลกที่กว้างขวางซึ่งรวมถึงกลุ่มผลิตภัณฑ์ที่ครอบคลุมของกล้องที่ประเมินและพร้อมสําหรับการผลิต บอร์ดประมวลผล สายเคเบิล ตัวเชื่อมต่อ และการสนับสนุนซอฟต์แวร์/ไดรเวอร์ ทั้งหมดนี้ผ่านการทดสอบและตรวจสอบภายใต้สภาวะจริงที่เข้มงวดสําหรับนักพัฒนาหุ่นยนต์ ระบบนิเวศนี้แปลเป็นวงจรการพัฒนาที่สั้นลง การผสานรวมที่ง่ายขึ้น และอุปสรรคที่ลดลงในการปรับขนาดจากต้นแบบไปจนถึงการผลิต
GMSL เทียบกับ Legacy Robotics Vision Connectivity
ในช่วงไม่กี่ปีที่ผ่านมา GMSL สามารถเข้าถึงได้มากขึ้นนอกเหนือจากอุตสาหกรรมยานยนต์ ซึ่งเปิดโอกาสใหม่ๆ สําหรับระบบหุ่นยนต์ประสิทธิภาพสูงเนื่องจากความต้องการการมองเห็นของหุ่นยนต์เพิ่มขึ้นด้วยกล้องที่มากขึ้น ความละเอียดที่สูงขึ้น การซิงโครไนซ์ที่แน่นขึ้น และสภาพแวดล้อมที่รุนแรงขึ้น อินเทอร์เฟซแบบดั้งเดิม เช่น USB และอีเธอร์เน็ตมักจะขาดแคลนในแง่ของแบนด์วิดท์ เวลาแฝง และความซับซ้อนในการรวมขณะนี้ GMSL กําลังกลายเป็นเส้นทางการอัปเกรดที่ต้องการ โดยนําเสนอโซลูชันที่แข็งแกร่ง ปรับขนาดได้ และพร้อมสําหรับการผลิต ซึ่งกําลังค่อยๆ เข้ามาแทนที่ USB และอีเทอร์เน็ตในแพลตฟอร์มหุ่นยนต์ขั้นสูงจํานวนมากตารางที่ 1 เปรียบเทียบเทคโนโลยีทั้งสามในเมตริกหลักที่เกี่ยวข้องกับการออกแบบการมองเห็นของหุ่นยนต์
สรุป
เมื่อหุ่นยนต์เคลื่อนเข้าสู่สภาพแวดล้อมที่มีความต้องการมากขึ้นและในกรณีการใช้งานที่หลากหลายระบบการมองเห็นจะต้องพัฒนาเพื่อรองรับจํานวนเซ็นเซอร์ที่สูงขึ้นแบนด์วิดท์ที่มากขึ้นและประสิทธิภาพที่กําหนดได้แม้ว่าโซลูชันการเชื่อมต่อแบบเดิมจะยังคงมีความสําคัญต่อการพัฒนาและสถานการณ์การปรับใช้บางอย่าง แต่ก็ทําให้เกิดการแลกเปลี่ยนในด้านเวลาแฝงการซิงโครไนซ์และการรวมระบบที่จํากัดความสามารถในการปรับขนาด GMSL ด้วยการผสมผสานระหว่างอัตราข้อมูลที่สูงการเข้าถึงสายเคเบิลที่ยาวการจ่ายพลังงานแบบบูรณาการและเวลาแฝงต่ําแบบสองทิศทางเป็นรากฐานที่ได้รับการพิสูจน์แล้วสําหรับการสร้างระบบการมองเห็นของหุ่นยนต์ที่ปรับขนาดได้ด้วยการนํา GMSL มาใช้นักออกแบบสามารถเร่งการเปลี่ยนจากต้นแบบไปสู่การผลิตส่งมอบหุ่นยนต์ที่ชาญฉลาดและน่าเชื่อถือมากขึ้นพร้อมที่จะตอบสนองความท้าทายของการใช้งานในโลกแห่งความเป็นจริงที่หลากหลาย


ผลิตภัณฑ์
March 5, 2026
การสร้างระบบการมองเห็นสำหรับหุ่นยนต์ประสิทธิภาพสูงด้วย GMSL
ปลดล็อกความเร็วในการมองเห็นของหุ่นยนต์ชั้นยอดโดยเชี่ยวชาญการเชื่อมต่อ GMSL ในการออกแบบครั้งต่อไปของคุณ
by
นักเขียนบทความ

