
ผลิตภัณฑ์
19
Jan
การตายของ LiDAR? เหตุใดเรดาร์ภาพ 4 มิติจึงชนะการแข่งขันอัตโนมัติในปี 2026
มาร่วมค้นพบว่า เหตุใดเรดาร์ภาพ 4 มิติจึงกลายเป็นสายตาใหม่ของการปฏิวัติ อัตโนมัติในปี 2026
ตลอดช่วงทศวรรษที่ผ่านมาการแสวงหาการขับขี่ยานยานพาหนะอย่างเต็มรูปแบบ และมีประสิทธิภาพมักถูกเชื่อมโยงกับเทคโนโลยีที่สำคัญเพียงหนึ่งเดียวคือ เซ็นเซอร์ LiDAR ที่สามารถหมุนได้และติดตั้งอยู่ด้านบนของตัวรถ มันเป็นสัญลักษณ์สำคัญของ รถยนต์ขับเคลื่อนอัตโนมัติ เป็นสิ่งที่บ่งบอกถึงอนาคตที่เครื่องจักรมองเห็นโลก ได้ดีกว่ามนุษย์ อย่างไรก็ตาม เมื่อก้าวเข้าสู่ปี 2026 เทคโนโลยีได้มีการเปลี่ยนแปลงมาก ยิ่งขึ้น ในขณะที่มีรายงานเกี่ยวกับการสิ้นสุดของเทคโนโลยี LiDAR และเทคโนโลยีใหม่ได้ ก้าวขึ้นมาเป็นผู้นำในการแข่งขันด้านของความปลอดภัย ด้านขนาด และมีความคุ้มค่ายิ่งขึ้น คือ เรดาร์ภาพ 4 มิติ (4D Imaging Radar)เทคโนโลยีนี้ไม่ได้ปรับปรุงเพียงเล็กน้อย แต่ เปลี่ยนแปลงโครงสร้างพื้นฐานการรับรู้ของรถยนต์ขับเคลื่อนอัตโนมัติ (Avs : Autonomous Vehicles ) ทำให้เกิดการการพัฒนาอย่างเข้มข้น ตลอดจนลำดับความสำคัญของฮาร์ดแวร์ ในอุตสาหกรรมนี้
ข้อบกพร่องพื้นฐานของระบบออปติคอล ( Optical Flaws)
การทำความเข้าใจว่า เหตุใดเรดาร์ 4 มิติจึงประสบความสำเร็จต้องเริ่มจากการ ทบทวนข้อจำกัด LiDAR ก่อน ในปี 2026 LiDAR ที่ใช้พัลส์แสงเลเซอร์ในการสร้างแผนที่ 3 มิติความละเอียดสูงเป็นระบบออปติคอล ที่มีจุดอ่อนเช่นเดียวกับดวงตามนุษย์ และ กล้องถ่ายรูปเมื่ออยู่ในสภาพอากาศที่ไม่เอื้ออำนวยเช่น พายุฝนหนักทำให้กล้องมองไม่เห็น หมอกหนาทำให้เกิดการกระเจิงของแสง หรือ หิมะทำให้เกิดสัญญาณรบกวน ประสิทธิภาพ ของ LiDAR จึงลดลงอย่างมาก โฟตอน (Photons) กระจัดกระจาย และถูกดูดซับโดย อนุภาคของน้ำจนเกิดจุดบกพร่อง ไม่น่าเชื่อถือเช่น รถยนต์ไร้คนขับที่วิ่งด้วยความเร็ว สูงบนทางหลวง ถ้าฝนตกหนักจะสูญเสียการมองเห็นอย่างกะทันหัน นอกจากนี้ การพัฒนา LiDAR ที่สามารถหมุนแบบเชิงกล ตามด้วยการเปลี่ยนไปใช้เทคโนโลยี MEMS และ OPA แบบโซลิดสเตทนั้นนอกจากใช้เวลานานและค่าใช้จ่ายสูงยังท้าทายกฎของฟิสิกส์และต้นทุน การผลิตอย่างต่อเนื่อง แม้ราคาจะลดลงแล้ว ก็ยังคงมีปัญหาด้านขอบเขตการใช้งาน ความละเอียดในการใช้งานอัตโนมัติด้วยความเร็วสูง ขนาดกะทัดรัด คุณภาพระดับยานยนต์ และความทนทานต่อสภาพอากาศ
4 มิติที่เป็นมากกว่าการตรวจจับ
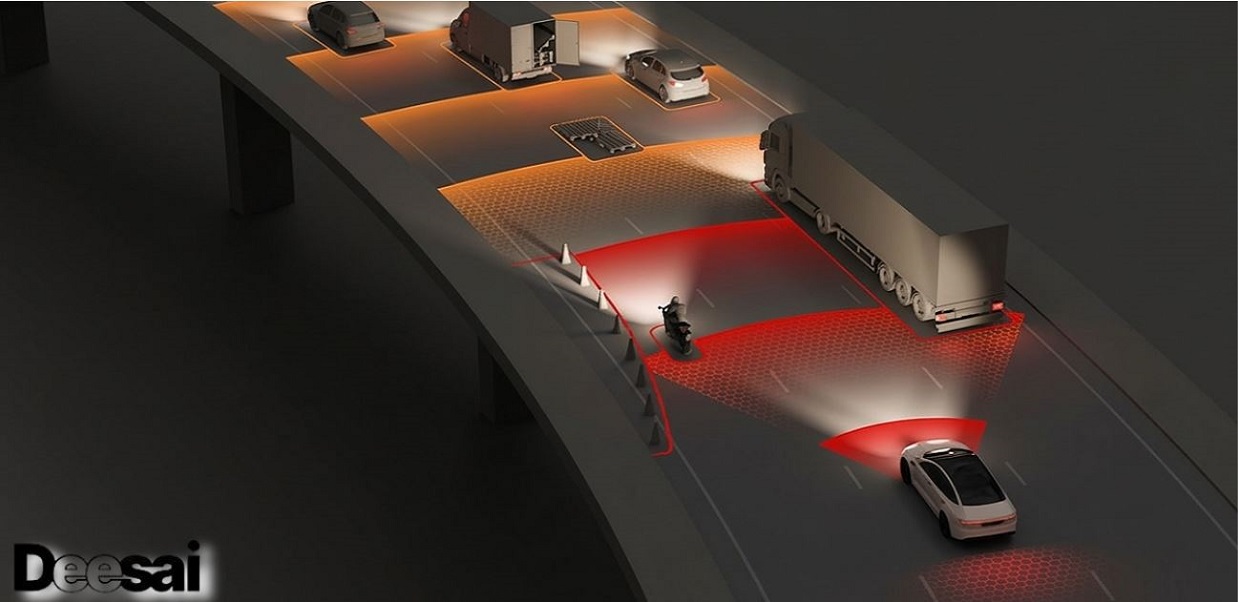
เรดาร์ภาพ 4 มิติ เป็นเทคโนโลยีที่พัฒนาอย่างรวดเร็วในช่วงสามปีที่ผ่านมา แตกต่างจากเรดาร์แบบดั้งเดิมที่วัดระยะทางและความเร็วใน 2 มิติมุมราบ เรดาร์ภาพ 4 มิติเพิ่มข้อมูลที่สำคัญสองจุดได้แก่ ระดับความสูง (ความสูง) และ1 มิติของความเร็วที่มี ความละเอียดสูง ซึ่งสร้างกลุ่มจุดข้อมูลที่หนาแน่นและสมบูรณ์ แม้ว่าจะมีความละเอียด สัมบูรณ์ต่ำกว่า LiDAR แต่ก็มีความน่าเชื่อถือมากกว่า อีกทั้งสามารถวัดระยะทาง มุมอะซิมุธ ระดับความสูง และที่สำคัญที่สุดคือ วัดความเร็วเชิงรัศมีทันทีของทุกวัตถุที่ตรวจจับได้ พร้อมกัน หมายความว่า ณ จุดเวลาเดียว ระบบไม่เพียงแต่รู้ว่าวัตถุอยู่ที่ไหน แต่ยังรู้ว่า วัตถุเคลื่อนที่เร็วแค่ไหน และเคลื่อนที่ในทิศทางใด เมื่อเปรียบเทียบกับยานพาหนะ ข้อมูล "ดอปเปลอร์ (Doppler)" นี้เป็นตัวเปลี่ยนเกม มันช่วยให้ยานพาหนะสามารถแยกแยะได้ทันที ระหว่างกำแพงคอนกรีตที่หยุดนิ่งกับคนเดินเท้าที่กำลังจะก้าวลงถนน หรือ ระหว่างสะพาน ลอย กับรถยนต์ที่จอดอยู่ โดยไม่จำเป็นต้องติดตามวัตถุเหล่านั้นในหลายเฟรม มันมอบ ความสามารถในการรับรู้การเคลื่อนไหวแบบเรียลไทม์ ซึ่ง LiDAR และกล้องทั่วเทียบไม่ได้
ข้อได้เปรียบทางเศรษฐกิจและวิศวกรรมที่ไม่มีใครเทียบได้
การเปลี่ยนแปลงเชิงกลยุทธ์ไปสู่เรดาร์ภาพ 4 มิติในปี 2026 ไม่ได้มีเรื่อง ประสิทธิภาพ เพียงอย่างเดียว แต่เกี่ยวข้องกับเศรษฐกิจและการออกแบบระบบอีกด้วย ปัจจุบันเรดาร์ภาพ 4 มิติระดับไฮเอนด์เพียงหน่วยเดียวสามารถทำงาน ที่ต้องใช้เรดาร์แบบ ดั้งเดิมหลายตัว และ LiDAR ระยะสั้นหลายตัวรวมกันได้ การรวมกันนี้ลดต้นทุนวัสดุ (BOM: Bill of Materials) สำหรับผู้ผลิตรถยนต์ได้อย่างมาก ยิ่งไปกว่านั้น เทคโนโลยีเรดาร์ โดยพื้นฐานแล้วเป็นเทคโนโลยีเซมิคอนดักเตอร์ มันใช้กระบวนการผลิต CMOS เดียวกัน กับต้นทุนของชิปคอมพิวเตอร์ลดลงมานานหลายทศวรรษ เมื่อปริมาณเพิ่มขึ้น ต้นทุนต่อ หน่วยจะลดลง ในแบบที่ระบบออปติคอลที่มีความซับซ้อนทางกลไกไม่สามารถทำได้ ข้อมูลด้านเศรษฐกิจนี้ทำให้เรดาร์ 4 มิติเป็นที่ชื่นชอบของ CFO และเจ้าหน้าที่จัดซื้อ จัดจ้างใน OEM ยานยนต์รายใหญ่ทุกราย เพราะมันมีเส้นทางการใช้งานชัดเจนและ ปรับขนาดไปใช้ในวงกว้างได้ ในขณะที่ LiDAR เปรียบเสมือนเครื่องมือทางวิทยาศาสตร์ เฉพาะทางในหลายๆ ด้าน
สถาปัตยกรรมที่ซ้ำซ้อน ไม่ใช่ผู้ชนะเพียงหนึ่งเดียว
สิ่งสำคัญคือ การระบุว่าเรดาร์ภาพ 4 มิติไม่ได้ "กำจัด" LiDAR ในแง่ของการ ทดแทนทั้งหมด สิ่งที่ซับซ้อนในปี 2026 ที่สุดคือ การพึ่งพาสถาปัตยกรรมฟิวชั่น เซ็นเซอร์ที่ซ้ำซ้อนกันอย่างไรก็ตาม ลำดับชั้นของฟิวชั่นนั้นได้เปลี่ยนไปแล้ว กล้องยังคงมีความสำคัญต่อความเข้าใจเชิงความหมายเช่น การอ่านป้าย การจดจำ สัญญาณไฟจราจรตามสี และการระบุประเภทของวัตถุ LiDAR กำลังถูกลดบทบาทลงเรื่อยๆ ในฐานะเครื่องมือตรวจสอบภาคพื้นดินความละเอียดสูงและเครื่องมือตรวจสอบทางเรขา คณิตที่ซ้ำซ้อนในสภาพแวดล้อมเมืองที่ซับซ้อน อย่างไรก็ตาม ภาระหลักในการ "ตรวจจับและติดตามวัตถุ" ในปัจจุบันตกอยู่กับเรดาร์ภาพ 4 มิติ ข้อมูลของมันมีความ สมบูรณ์และกรองการเคลื่อนไหวโดยธรรมชาติ ทำให้เป็นสมมติฐานเบื้องต้นที่น่าเชื่อ ถือที่สุดในโลก ปัจจุบันโมเดล AI ที่ควบคุมระบบคอมพิวเตอร์ของรถยนต์ได้รับการฝึกฝน ให้เชื่อถือข้อมูลความเร็วจากเรดาร์เป็นอันดับแรก และใช้เซ็นเซอร์เชิงแสง (กล้องและ LiDAR) เพื่อเพิ่มรายละเอียดเชิงความหมายและตรวจสอบความถูกต้องขั้นสุดท้าย
เส้นทางปี 2026 และอนาคต
เมื่อเรามองไปที่ภาพรวมของยานยนต์ไร้คนขับในปี 2026 กลยุทธ์ที่ประสบความ สำเร็จชัดเจน คือ การให้ความสำคัญกับการตรวจจับที่แข็งแกร่งในทุกสภาพอากาศ ซึ่งให้ ข้อมูลเชิงลึกที่นำไปใช้ได้จริงด้วยต้นทุนการประมวลผลที่ต่ำที่สุดเท่าที่จะเป็นไปได้ เรดาร์ภาพ 4 มิติ ตอบโจทย์นี้ได้อย่างสมบูรณ์แบบ มันแก้ปัญหาด้านอุตสาหกรรม ที่ใหญ่ที่สุดคือ ความน่าเชื่อถือในสภาวะที่หลากหลายได้ดี ในขณะเดียวกันก็เสนอ โมเดลธุรกิจที่ใช้งานได้จริงในการผลิตจำนวนมาก ส่วน LiDAR ก็ยังไม่สิ้นสุดบทบาทลง มันไม่ใช่ "ดวงตา" ของรถยนต์ไร้คนขับอีกต่อไป แต่เป็น "เครื่องสแกนรายละเอียด" เฉพาะทางสำหรับการทำแผนที่ความละเอียดสูง และการตรวจสอบในระยะใกล้ การแข่งขัน เพื่อพัฒนาระบบขับเคลื่อนอัตโนมัติเคยเป็นการประกวดที่ตัดสินจากความคมชัดของ LiDAR แต่ในปี 2026 มันคือ การที่ชนะกันด้วยความน่าเชื่อถือ ข้อมูลเชิงลึก และราคาที่เหมาะสม ของชุดเซ็นเซอร์ และด้วยมาตรวัดนั้น เรดาร์ภาพ 4 มิติ จึงได้ก้าวขึ้นมาเป็นผู้นำด้าน ยานยนต์ไร้คนขับ


ผลิตภัณฑ์
March 31, 2026
การตายของ LiDAR? เหตุใดเรดาร์ภาพ 4 มิติจึงชนะการแข่งขันอัตโนมัติในปี 2026
มาร่วมค้นพบว่า เหตุใดเรดาร์ภาพ 4 มิติจึงกลายเป็นสายตาใหม่ของการปฏิวัติ อัตโนมัติในปี 2026
by
นักเขียนบทความ

