
ผลิตภัณฑ์
19
Jan
การถ่ายภาพ 4 มิติทํางานร่วมกับเซ็นเซอร์เรดาร์อย่างไร
ค้นพบว่าเซ็นเซอร์ภาพ 4 มิติติดตามการเคลื่อนไหวและความลึกแบบเรียลไทม์ได้อย่างไร

เรดาร์ถ่ายภาพสี่มิติ (4D) เป็นเทคโนโลยีการตรวจจับความละเอียดสูงที่เพิ่มข้อมูลแนวตั้ง (ระดับความสูง) ให้กับเรดาร์ 3 มิติแบบดั้งเดิม (ช่วง, ราบ, Doppler) ด้วยการจับข้อมูลเชิงพื้นที่ 3 มิติบวกแนวตั้ง จะสร้างพอยต์คลาวด์ที่มีความละเอียดสูงหนาแน่น ซึ่งช่วยเพิ่มการตรวจจับวัตถุในยานยนต์ไร้คนขับ การเฝ้าระวัง และการใช้งานในอุตสาหกรรม โดยไม่คํานึงถึงแสงหรือสภาพอากาศ
จํานวนเรดาร์ 4D ที่ใช้ในระบบช่วยเหลือผู้ขับขี่ขั้นสูง (เอดาส) แตกต่างกันอย่างมาก ระบบระดับเริ่มต้นอาจมีเรดาร์ด้านหน้าเพียงตัวเดียว ในขณะที่ความเป็นอิสระในระดับที่สูงขึ้นต้องการเรดาร์ที่มีประสิทธิภาพสูงขึ้นเรื่อยๆ
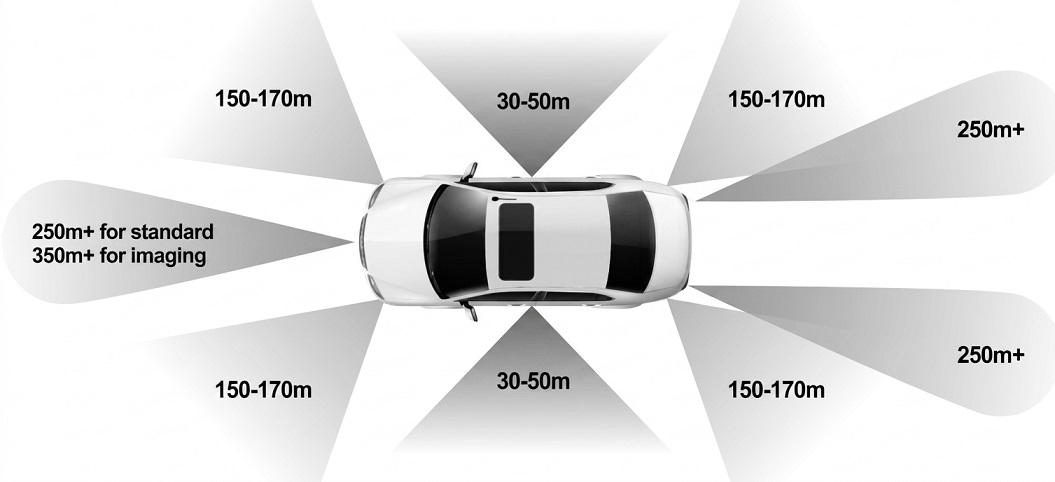
ระดับประสิทธิภาพ ADAS สูงอาจต้องใช้เรดาร์สูงสุด 9 ตัวขึ้นไป รวมถึงตําแหน่งด้านหน้า ด้านหลัง ด้านข้าง และมุม โดยมีข้อกําหนดที่แตกต่างกันสําหรับระยะการตรวจจับและความละเอียด (รูป 1). นอกเหนือจากการใช้งานเฉพาะ เช่น การเปลี่ยนเลนหรือการหลีกเลี่ยงการชนแล้ว ภาพเรดาร์ต่างๆ ยังสามารถต่อเข้าด้วยกันเพื่อให้การรับรู้สภาพแวดล้อม 360°
ข้อมูลเบื้องต้น
เรดาร์ภาพ 4 มิติใช้อาร์เรย์เสาอากาศหลายอินพุตหลายเอาต์พุต (MIMO) เพื่อสร้างช่องสัญญาณหลายร้อยหรือหลายพันช่องเพิ่มความละเอียดเชิงมุมและช่วยให้สามารถสร้าง "พอยต์คลาวด์" ที่หนาแน่นซึ่งแสดงถึงรูปร่างและตําแหน่งของวัตถุหลายชิ้นด้วยความแม่นยําสูง พอยต์คลาวด์ช่วยให้สามารถตรวจจับวัตถุและการทําแผนที่โดยละเอียดของสภาพแวดล้อม รวมถึง:
- การวัดระยะทางเพื่อรองรับการหลีกเลี่ยงการชน การตรวจจับจุดบอด การเปลี่ยนเลนที่ปลอดภัย และฟังก์ชันอื่นๆ
- การวัดความเร็วติดตามความเร็วสัมพัทธ์ของวัตถุที่เคลื่อนที่และคาดการณ์อันตรายที่อาจเกิดขึ้น
- ความละเอียดเชิงมุมสามารถกําหนดตําแหน่งสัมพัทธ์ของวัตถุที่เคลื่อนที่และหยุดนิ่งได้อย่างแม่นยํา
- การติดตามหลายวัตถุสําหรับการตรวจสอบยานพาหนะ คนเดินเท้า นักปั่นจักรยาน และวัตถุอื่นๆ ในบริเวณใกล้เคียงพร้อมกัน
การเพิ่มการวัดระดับความสูงช่วยให้เรดาร์ 4 มิติสามารถตรวจจับความสูงของวัตถุได้ ซึ่งช่วยให้ระบบสามารถแยกแยะระหว่างรถที่หยุดอยู่ใต้สะพานและสะพานที่อยู่เหนือศีรษะ.
เทคโนโลยีคลื่นต่อเนื่องแบบมอดูเลตความถี่ (FMCW) ถูกนํามาใช้เกือบทุกแบบสําหรับเรดาร์ถ่ายภาพ 4 มิติ รวมถึงยานยนต์ โดรน การควบคุมกระบวนการทางอุตสาหกรรม หุ่นยนต์ และการใช้งานอื่นๆ FMCW ปล่อยคลื่นวิทยุอย่างต่อเนื่องและเปรียบเทียบคลื่นสะท้อนเพื่อวัดระยะทาง ความเร็ว และมุม
ประสิทธิภาพยุคใหม่
เช่นเดียวกับเทคโนโลยีอิเล็กทรอนิกส์ส่วนใหญ่ระบบเรดาร์ 4 มิติกําลังถูกผลักดันเพื่อเพิ่มประสิทธิภาพและต้นทุนที่ต่ําลง ตัวอย่างเช่น เทคโนโลยีเสาอากาศได้รับการพัฒนาโดยใช้อุโมงค์ที่เติมอากาศขึ้นรูปเพื่อนําทางคลื่น ช่วยลดการสูญเสียสัญญาณ และปรับปรุงความไวสําหรับความละเอียดที่สูงขึ้น
ระบบกําลังเปลี่ยนจากวงจรรวมไมโครเวฟเสาหิน (MMIC) ที่มีราคาแพงไปสู่เทคโนโลยี CMOS เพื่อการผสานรวมที่ดีขึ้นและความคุ้มค่า
เนื่องจากเรดาร์ภาพ 4 มิติถูกนํามาใช้กันอย่างแพร่หลายในการใช้งานที่หลากหลายมากขึ้นโมดูลแบบบูรณาการจึงถูกนํามาใช้มากขึ้นเพื่อควบคุมต้นทุนและปรับปรุงประสิทธิภาพ การเรียงซ้อนโมดูลแบบบูรณาการหลายโมดูลแทนที่จะเป็นชิปตัวรับส่งสัญญาณแต่ละตัวช่วยลดการสูญเสียสัญญาณข้อผิดพลาดในการซิงโครไนซ์และข้อ จํากัด ด้านความร้อน นอกจากนี้ยังสามารถลดต้นทุนการประกอบ ทําให้รอยเท้า PCB มีขนาดเล็กลง และลดความซับซ้อนในการผลิต
การใช้เสาอากาศท่อนําคลื่นในตัวหรือโมดูลหลายชิปยังสามารถเปิดใช้งานความละเอียดเชิงมุมที่สูงขึ้นและช่วงที่ยาวขึ้นโดยไม่ต้องใช้พลังงานสูงและการสอบเทียบที่ซับซ้อนที่จําเป็นเมื่อเรียงซ้อนชิปแต่ละตัว
ภาวะแทรกซ้อนของตําแหน่ง
นักวางผังเมืองให้ความสนใจเป็นพิเศษในการเพิ่มประโยชน์สูงสุดของเรดาร์ภาพ 4 มิติเพื่อเพิ่มความปลอดภัยให้กับทั้งผู้ขับขี่และคนเดินเท้า ด้วยเหตุนี้ จึงมีการพัฒนากรณีการใช้งานหลักสองกรณี: Highway Pilot และ Urban Pilot เรดาร์ถ่ายภาพคาดว่าจะตอบสนองความต้องการของทั้งสองฝ่าย
Highway Pilot มุ่งเน้นไปที่ถนนเปิดและต้องใช้เรดาร์ 4 มิติที่สามารถตรวจจับวัตถุที่เคลื่อนที่อย่างรวดเร็วในระยะทางที่ค่อนข้างไกลเพื่อรองรับการหลบหลีกด้วยความเร็วสูงอย่างปลอดภัย Urban Pilot มุ่งเน้นไปที่สภาพแวดล้อมที่ซับซ้อนมากขึ้นในระยะใกล้ รวมถึงวัตถุที่เคลื่อนที่และหยุดนิ่ง และต้องการการตรวจจับและจําแนกวัตถุหลายชิ้นพร้อมกันแบบเรียลไทม์
ข้อกําหนดสําหรับ Highway Pilot ได้แก่ ความแม่นยําระดับเลนและมุมมองด้านหน้า (FOV) ที่ 10° ถึง 30° โดยมองไปที่เส้นทางข้างหน้า Urban Pilot ต้องการขอบเขตการมองเห็นที่กว้างขึ้นสําหรับวัตถุระยะสั้นและระยะกลางที่ครอบคลุม 360° โดยเรดาร์เข้ามุมให้ FOV สูงถึง 150° เพื่อตรวจจับการจราจรข้ามและคนเดินถนน
Urban Pilot ยังต้องการความละเอียดเชิงมุมที่สูงขึ้นเพื่อแยกวัตถุที่อยู่ใกล้ชิดในการจราจรที่หนาแน่นและความเร็วต่ํา ในทั้งสองกรณี ความคาดหวังสําหรับจํานวนเรดาร์ถ่ายภาพบนยานพาหนะและประสิทธิภาพของเรดาร์จะเพิ่มขึ้นในอนาคต (รูป 2)

สรุป
4เรดาร์ภาพ D ให้ภาพความละเอียดสูงที่ใช้ในการใช้งานที่หลากหลายตั้งแต่ ADAS ยานยนต์สําหรับการขับขี่อัตโนมัติไปจนถึงโดรนการควบคุมกระบวนการทางอุตสาหกรรมและหุ่นยนต์ สามารถใช้เรดาร์หลายตัวเพื่อให้การรับรู้สถานการณ์ที่สมบูรณ์ยิ่งขึ้น และความต้องการด้านประสิทธิภาพจะเพิ่มขึ้นเมื่อเวลาผ่านไป ในขณะที่ต้นทุนคาดว่าจะลดลง


ผลิตภัณฑ์
May 14, 2026
การถ่ายภาพ 4 มิติทํางานร่วมกับเซ็นเซอร์เรดาร์อย่างไร
ค้นพบว่าเซ็นเซอร์ภาพ 4 มิติติดตามการเคลื่อนไหวและความลึกแบบเรียลไทม์ได้อย่างไร
by
นักเขียนบทความ

