
ผลิตภัณฑ์
19
Jan
การวัดแบบเนียร์ฟิลด์
ดูว่าการวัดระยะใกล้สามารถบันทึกรูปแบบเสาอากาศได้อย่างครบถ้วนโดยไม่จำเป็นต้องใช้พื้นที่ทดสอบกลางแจ้งขนาดใหญ่ได้อย่างไร
เครื่องมือจำลองและวิเคราะห์ทางแม่เหล็กไฟฟ้าในปัจจุบันมีความซับซ้อนและสามารถจำลองอุปกรณ์ที่ซับซ้อนในสถานการณ์จริงได้ ดังนั้นจึงมักเกิดคำถามว่า ทำไมฉันจึงต้องทดสอบเสาอากาศ? การจำลองยังคงขึ้นอยู่กับสมมติฐานเกี่ยวกับสภาพแวดล้อมที่อุปกรณ์จะถูกใช้งาน ซึ่งอาจไม่ถูกต้องเสมอไป และยังมี "สิ่งที่ไม่ทราบ" ที่คาดไม่ถึงซึ่งเราไม่ได้คำนึงถึงในระหว่างกระบวนการออกแบบ การวัดจึงถูกนำมาใช้เพื่อตรวจสอบการออกแบบอุปกรณ์ของเราในสภาพแวดล้อมที่ตั้งใจจะใช้งาน
เนื่องจากเสาอากาศมักถูกออกแบบมาให้ทำงานในระยะทางไกล ดังนั้นนี่คือวิธีที่เราต้องการทดสอบอุปกรณ์ของเราในสิ่งที่เรียกว่า "สนามไกล" ที่แผ่รังสี อย่างไรก็ตาม วิธีนี้มักทำได้ยากเนื่องจากปัจจัยจำกัดอื่นๆ เช่น พื้นที่ว่างและสัญญาณรบกวนภายนอกหากทดสอบกลางแจ้ง อีกวิธีหนึ่งคือการวัดพลังงานที่แผ่รังสีจากเสาอากาศใกล้กับอุปกรณ์ใน "สนามใกล้" ที่แผ่รังสี แล้วใช้ขั้นตอนวิธีทางคณิตศาสตร์ในการแปลงข้อมูลที่วัดได้เป็นสนามไกลที่แผ่รังสี พื้นที่ที่จำเป็นสำหรับการวัดสนามใกล้มีน้อยกว่ามาก ทำให้สามารถทดสอบเสาอากาศขนาดใหญ่ทางไฟฟ้าได้ในห้องทดสอบภายในอาคาร
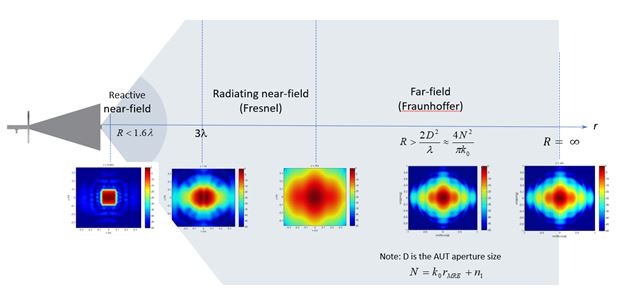
สนามแผ่รังสีของเสาอากาศ
สนามใกล้แบบปฏิกิริยาจะอยู่ใกล้กับพื้นผิวของเสาอากาศที่แผ่รังสีมาก โดยทั่วไปจะอยู่ภายในระยะทางประมาณหนึ่งหรือสองความยาวคลื่น ภายในบริเวณนี้ สนามจะเปลี่ยนแปลงอย่างรวดเร็วเนื่องจากคลื่นเอวาเนสเซนต์ที่เกิดจากกระแสบนพื้นผิว และไม่แพร่กระจาย ที่ระยะทางสองสามความยาวคลื่น เราจะเข้าสู่บริเวณสนามใกล้แบบแผ่รังสี ที่นี่สนามแม่เหล็กไฟฟ้ามีพฤติกรรมที่ดี แต่ยังคงแสดงด้วยคลื่นทรงกลม และลำแสงของเสาอากาศยังไม่สมบูรณ์ บริเวณสนามใกล้ขยายไปถึงระยะทาง 2D²/l ซึ่ง ณ จุดนี้เราสามารถกล่าวได้ว่าสนามมีลักษณะคล้ายคลื่นระนาบ บริเวณนี้เรียกว่าบริเวณสนามไกล (หรือ Fraunhoffer) และเป็นบริเวณที่ลำแสงของเสาอากาศได้รับการพัฒนาแล้ว
ระยะทางไกลแค่ไหน?
ในทางปฏิบัติ สนามแม่เหล็กไฟฟ้าของเสาอากาศที่แผ่รังสีในพื้นที่ 3 มิติ สามารถแสดงได้ด้วยหน้าคลื่นทรงกลมเมื่อจุดสังเกตอยู่ห่างจากแหล่งกำเนิดมากพอ ที่ระยะห่างมากจากเสาอากาศแหล่งกำเนิด ความโค้งของหน้าคลื่นจะมีค่าน้อยที่ช่องรับแสงของเสาอากาศที่กำลังทดสอบ (AUT) และจะใกล้เคียงกับคลื่นระนาบสม่ำเสมอ หากระยะห่างจากแหล่งกำเนิดเท่ากับหรือมากกว่าขอบเขตด้านในของบริเวณสนามไกลของแหล่งกำเนิด Rmin > 2D2max/l แล้ว ความแตกต่างของเฟสสูงสุดระหว่างสนามตกกระทบจริงและการประมาณค่าในโซนไกลจะไม่เกิน 22.5 องศา (นั่นคือ
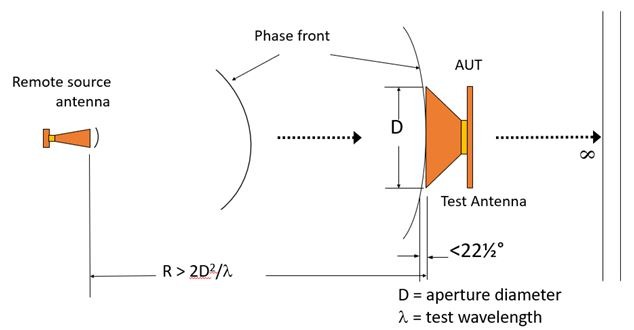
ข้อกำหนดข้างต้นนำไปสู่ความยากลำบากอย่างมากในการวัดเสาอากาศ – จำเป็นต้องมีระยะห่างมากระหว่างเสาอากาศแหล่งกำเนิดและ AUT ยิ่งขนาดทางไฟฟ้าของ AUT ใหญ่เท่าใด พื้นที่การวัดก็ยิ่งใหญ่ขึ้นเท่านั้น
แนวคิดการวัดสนามใกล้
ระบบการวัดสนามใกล้เสนอทางเลือกอื่นสำหรับการกำหนดคุณลักษณะของเสาอากาศในระยะทางที่ลดลง ในกรณีนี้ ระยะห่างระหว่างเสาอากาศแหล่งกำเนิด (หรือโพรบ) และ AUT มีเพียงไม่กี่ความยาวคลื่น
แนวคิดการวัดสนามใกล้ต้องการการรวบรวมพลังงานในสนามใกล้ที่แผ่รังสีของเสาอากาศ จากนั้นใช้อัลกอริทึมทางคณิตศาสตร์เพื่อแปลงผลลัพธ์เชิงพื้นที่ไปยังสนามไกล เนื่องจากอัลกอริทึมนี้ต้องการข้อมูลที่ซับซ้อน (เช่น I/Q) การวัดจึงต้องรวมทั้งแอมพลิจูดและเฟส นอกจากนี้ ยังจำเป็นต้องรวบรวมพลังงานที่แผ่รังสีจำนวนมากเพื่อให้ได้ผลลัพธ์ที่แม่นยำ ซึ่งต้องใช้การวัดแบบ 2 มิติ ในขณะที่การประมวลผลข้อมูลใช้เวลาเพียงไม่กี่นาที แต่เวลาในการวัดในระยะใกล้ อาจใช้เวลานาน อย่างไรก็ตาม ผลลัพธ์สุดท้ายจะให้ข้อมูลรูปแบบสนามไกลแบบ 2 มิติ ในลักษณะที่ประหยัดเวลามากกว่าการวัดแบบเดียวกันโดยใช้ระบบสนามไกล
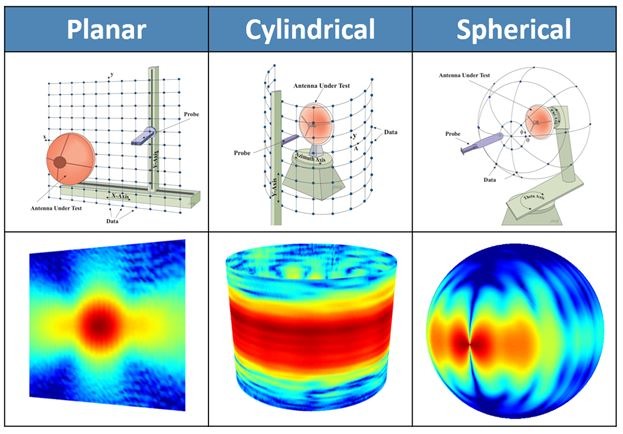
รูปทรงเรขาคณิตของการสแกนสนามใกล้
ระบบการวัดสนามใกล้มีให้เลือกหลายรูปแบบ และจำแนกตามรูปทรงเรขาคณิตของพื้นผิวสนามใกล้ที่วัด รูปทรงเรขาคณิตสนามใกล้แบบดั้งเดิม ได้แก่ ระนาบ ทรงกระบอก และทรงกลม รูปทรงเรขาคณิตที่ซับซ้อนกว่า เช่น ทรงกรวยหรือแบบไม่สอดคล้อง ก็เป็นไปได้ แต่พบได้น้อยกว่า
ระบบการวัดระยะใกล้ทุกระบบจะมีแกนการวัดอย่างน้อยสองแกน ได้แก่ แกนหลักและแกนรอง ซึ่งโดยทั่วไปเรียกว่าแกนสแกนและแกนก้าว ระบบระยะใกล้ยังสามารถจำแนกได้เป็นระบบโพรบเดี่ยวหรือระบบหลายโพรบ ในระบบโพรบเดี่ยว แกนการเคลื่อนที่ถูกใช้สำหรับทั้งแกนหลักและแกนรอง ในระบบหลายโพรบ แกนหลักจะถูกแทนที่ด้วยอาร์เรย์หลายโพรบ ซึ่งทำการสแกนทางอิเล็กทรอนิกส์ ในขณะที่ยังคงใช้แกนการเคลื่อนที่สำหรับแกนรอง อย่างไรก็ตาม เราจะจำกัดการอธิบายระยะใกล้ในส่วนนี้ไว้ที่ระบบโพรบเดี่ยว เนื่องจากหลักการพื้นฐานหลายอย่างยังใช้ได้กับระบบหลายโพรบด้วย
ในระบบการวัดระยะใกล้แบบระนาบ (PNF) โพรบเดี่ยว อุปกรณ์ที่กำลังทดสอบ (AUT) จะอยู่กับที่ และใช้สแกนเนอร์หุ่นยนต์ในการเคลื่อนเสาอากาศโพรบในระนาบ XY ที่อยู่ด้านหน้าของ AUT เนื่องจากระนาบถูกจำกัดให้เก็บรวบรวมพลังงานได้เฉพาะด้านหน้าของเสาอากาศเท่านั้น ระบบประเภทนี้จึงมีมุมมองภาพ (FOV) ที่จำกัด และเหมาะที่สุดสำหรับการวัดคุณสมบัติของเสาอากาศที่มีทิศทางสูง (เช่น อัตราขยาย > 15 dBi) ในมุมสนามไกลที่น้อยกว่า +/- 80 องศา
ระบบสนามใกล้ทรงกระบอก (CNF) สามารถให้การครอบคลุมมุมสนามไกล 360 องศาในระนาบพิกัดหนึ่ง แต่ยังคงมีการครอบคลุมที่จำกัดในระนาบอื่น ระบบประเภทนี้เหมาะที่สุดสำหรับการวัดคุณสมบัติของเสาอากาศแบบลำแสงพัด หรือเมื่อต้องการการครอบคลุมมุมมากกว่า +/- 80 องศาในระนาบพิกัดเดียว การวัดนี้ทำได้โดยการเพิ่มแกนหมุนสำหรับอุปกรณ์ที่กำลังทดสอบ (AUT) และใช้แกนเชิงเส้นเดียวในการเคลื่อนโพรบในทิศทางแนวตั้ง
ระบบสนามใกล้ทรงกลม (SNF) ใช้ในการวัดคุณสมบัติของเสาอากาศในช่วงมุมกว้าง และจำเป็นเมื่อทำการวัดเสาอากาศที่มีอัตราขยายต่ำ ระบบสนามใกล้ทรงกลมแบบโพรบเดี่ยวต้องการแกนการเคลื่อนที่สองแกนเพื่อหมุน AUT ในขณะที่โพรบยังคงอยู่กับที่ แม้ว่าระบบวัดสนามใกล้ทรงกลมจะสามารถรวบรวมพลังงานการแผ่รังสีทั้งหมดจาก AUT ได้ทั่วทั้งทรงกลม 360 องศา แต่การแปลง SNF-FF ต้องการการวัดทิศทางการโพลาไรซ์ของโพรบทั้งสองทิศทาง ซึ่งวิธีการทางเรขาคณิตอื่นๆ ไม่จำเป็นต้องทำเช่นนั้น
ข้อควรพิจารณาในการวัดสนามใกล้
มีข้อควรพิจารณาเพิ่มเติมบางประการที่ต้องนำมาพิจารณาเมื่อทำการวัดสนามใกล้
ประการแรก การแปลงทางคณิตศาสตร์จำเป็นต้องวัดพลังงานการแผ่รังสี "ที่มีนัยสำคัญ" ทั้งหมดของ AUT การรวบรวมพลังงานไม่เพียงพออาจส่งผลให้เกิดข้อผิดพลาดจากการตัดทอน ซึ่งเป็นสิ่งผิดปกติของกระบวนการแปลงที่พลังงานที่ผิดเพี้ยนจะถูกส่งกลับไปยังรูปแบบเสาอากาศสนามไกลที่แกนกลาง ซึ่งอาจส่งผลกระทบโดยตรงต่อความแม่นยำในการวัดค่าเกน หลักการคร่าวๆ ในการตรวจสอบว่าได้รวบรวมพลังงานที่สำคัญเพียงพอหรือไม่ คือ การตรวจสอบข้อมูลแอมพลิจูดสนามใกล้ที่วัดได้ และตรวจสอบข้อมูลที่ขอบเขตพื้นผิวว่าอยู่ห่างจากจุดสูงสุดของสนามใกล้ไม่ต่ำกว่า -30 dB และไม่เกิน -50 dB เพื่อลดข้อผิดพลาดจากการตัดทอนให้น้อยที่สุด
อีกประเด็นหนึ่งที่ต้องพิจารณาคือ ช่วงเวลาการสุ่มตัวอย่างข้อมูลบนพื้นผิวการวัดสนามใกล้ ทฤษฎีการสุ่มตัวอย่างของ Nyquist กำหนดว่าสัญญาณจะต้องถูกสุ่มตัวอย่างที่ความถี่เป็นสองเท่าของความถี่สัญญาณเพื่อสร้างสัญญาณที่ปราศจากภาพ ซึ่งเทียบเท่ากับช่วงเวลาการสุ่มตัวอย่าง 1/2 หรือน้อยกว่า เพื่อรับประกันว่าบริเวณสนามไกลที่ปราศจากภาพจะมีมุม +/-90 องศา อย่างไรก็ตาม ช่วงเวลาการสุ่มตัวอย่างอาจเพิ่มขึ้นได้เพื่อเร่งเวลาการวัดหากเก็บข้อมูลสำหรับมุมสนามไกลที่ลดลง ซึ่งมักเป็นกรณีเมื่อทำการวัดคุณลักษณะของเสาอากาศดาวเทียม
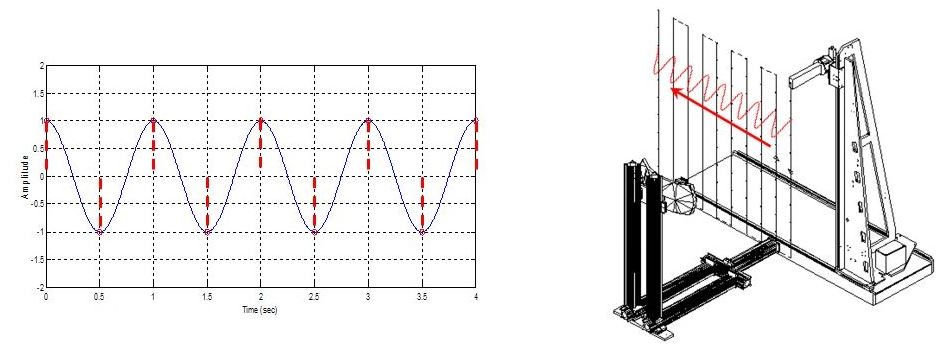
อีกหนึ่งข้อกำหนดสำหรับการวัดแบบใกล้สนามคือ ความแม่นยำในการกำหนดตำแหน่งของโพรบ ซึ่งควรมากกว่า 1/50 และอย่างน้อย 1/100 สำหรับการวัดไซด์โลบที่แม่นยำ สำหรับการวัดความถี่สูง ข้อกำหนดนี้อาจเกินค่าความคลาดเคลื่อนทางกลของระบบกำหนดตำแหน่งได้! เพื่อแก้ไขปัญหานี้ ผู้ให้บริการระบบใกล้สนามหลายราย (รวมถึง NPM) จึงนำเสนอโซลูชันเพื่อปรับปรุงความแม่นยำในการกำหนดตำแหน่ง โซลูชันของ NPM ให้การแก้ไขตำแหน่งแบบเรียลไทม์เพื่ออำนวยความสะดวกในการวัดที่ความถี่ระดับมิลลิเมตรและสูงกว่า
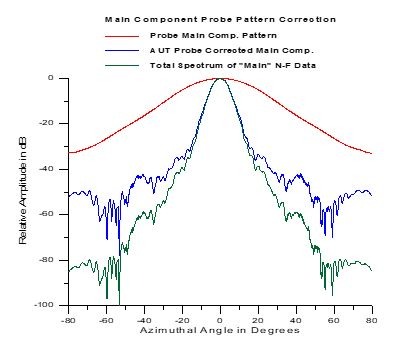
เนื่องจากการวัดแบบใกล้สนามเกี่ยวข้องกับเสาอากาศสองตัว (AUT และโพรบใกล้สนาม) การวัดที่ได้จึงเป็นการรวมกันของผลตอบสนองของเสาอากาศทั้งสอง เพื่อให้ได้ผลตอบสนองของ AUT เพียงอย่างเดียว จะต้องลบส่วนของโพรบออกจากข้อมูลที่ได้มา ซึ่งสามารถทำได้หากทราบรูปแบบของโพรบ และเป็นหนึ่งในเหตุผลที่มักใช้ท่อนำคลื่นแบบปลายเปิดเป็นโพรบใกล้สนาม นอกจากจะมีผลตอบสนองแบบ co-pol ที่กว้างและดีแล้ว ยังสามารถคำนวณรูปแบบได้ง่ายโดยอิงจากขนาดของท่อนำคลื่นของโพรบ
เมื่อทำการวัดสนามใกล้ การวัดด้วยโพรบทั้งสองทิศทางโพลาไรเซชันไม่จำเป็นต้องใช้เสมอไปเพื่อให้ได้ผลลัพธ์สนามไกล อย่างไรก็ตาม มีข้อยกเว้นอยู่บ้าง การวัดด้วยโพรบทั้งสองทิศทางโพลาไรเซชันนั้นจำเป็นสำหรับ (1) การได้มาซึ่งรูปแบบครอสโพลาไรเซชันสนามไกล (2) ข้อมูลไซด์โลบที่แม่นยำในบริเวณระหว่างทิศหลัก (3) การวัดเสาอากาศแบบโพลาไรซ์แบบวงกลมโดยใช้โพรบสนามใกล้แบบโพลาไรซ์เชิงเส้น และ (4) เมื่อทำการวัดสนามใกล้แบบทรงกลม
การวัดสนามใกล้เป็นทางเลือกหนึ่งสำหรับการวัดสนามไกลในการกำหนดคุณลักษณะของเสาอากาศและมีข้อดีหลายประการ อย่างไรก็ตาม นี่ไม่ใช่ "วิธีแก้ปัญหาแบบเดียวใช้ได้กับทุกกรณี" และมีบางแอปพลิเคชันที่การวัดสนามไกลอาจให้ผลลัพธ์ที่ดีกว่า NPM สามารถทำงานร่วมกับคุณเพื่อช่วยกำหนดวิธีแก้ปัญหาที่ถูกต้องสำหรับแอปพลิเคชันและข้อกำหนดการวัดของคุณ




ผลิตภัณฑ์
December 23, 2025
การวัดแบบเนียร์ฟิลด์
ดูว่าการวัดระยะใกล้สามารถบันทึกรูปแบบเสาอากาศได้อย่างครบถ้วนโดยไม่จำเป็นต้องใช้พื้นที่ทดสอบกลางแจ้งขนาดใหญ่ได้อย่างไร
by
นักเขียนบทความ

