
ผลิตภัณฑ์
19
Jan
วงจรการทำงานของคำสั่งหลัก
ค้นพบวิธีที่โปรเซสเซอร์ของคุณดึงข้อมูล ถอดรหัส และดําเนินการทุกคําสั่งในพริบตา

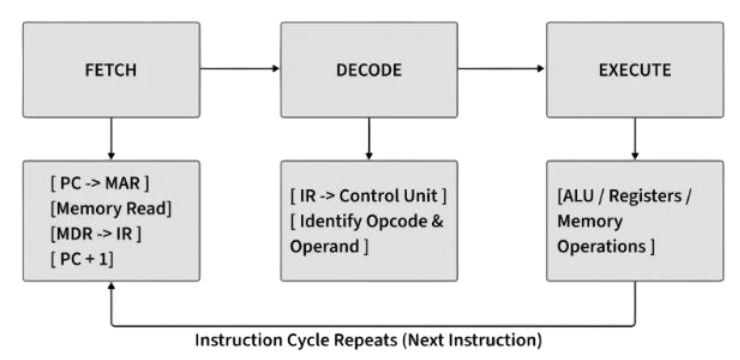
วงจรคําสั่งเป็นกระบวนการปฏิบัติงานพื้นฐานของ CPU ของคอมพิวเตอร์ โดยอ้างถึงลําดับของขั้นตอนที่ตามมาเพื่อดึงข้อมูล ถอดรหัส และดําเนินการคําสั่งระดับเครื่องแต่ละรายการ วงจรนี้เกิดขึ้นหลายล้านหรือหลายพันล้านครั้งต่อวินาที เพื่อให้มั่นใจได้ถึงการดําเนินการที่เหมาะสมและการทํางานของระบบที่ราบรื่น
- ตรวจสอบให้แน่ใจว่าคําสั่งได้รับการประมวลผลอย่างชัดเจนและเป็นระเบียบ
- CPU ดึงข้อมูล ถอดรหัส และดําเนินการคําสั่งเพื่อทํางานอย่างต่อเนื่อง
การลงทะเบียนคีย์ที่ใช้ในรอบการเรียนการสอน
การลงทะเบียนหลายตัวภายใน CPU มีส่วนร่วมอย่างแข็งขันในการดําเนินการตามรอบคําสั่ง:
- ตัวนับโปรแกรม (PC):เก็บที่อยู่ของคําสั่งถัดไปที่จะดําเนินการ เพิ่มขึ้นโดยอัตโนมัติหลังจากดึงข้อมูลคําสั่ง
- การลงทะเบียนคําสั่ง (IR): เก็บคําสั่งที่กําลังดําเนินการอยู่
- การลงทะเบียนที่อยู่หน่วยความจํา (MAR) (อุปกรณ์เสริม): เก็บที่อยู่ของตําแหน่งหน่วยความจําที่กําลังเข้าถึง
- การลงทะเบียนข้อมูลหน่วยความจํา (MDR) (อุปกรณ์เสริม): เก็บข้อมูลที่อ่านจากหรือเขียนลงในหน่วยความจํา
รอบการดึงข้อมูล
รอบการดึงข้อมูลเป็นขั้นตอนแรกในวงจรการเรียนการสอน ที่นี่ CPU จะดึงคําสั่งจากหน่วยความจําโดยใช้ตัวนับโปรแกรม (PC)
ขั้นตอนในรอบการดึงข้อมูล:
- ที่อยู่ในพีซีจะถูกโอนไปยัง MAR
- ชุดควบคุมส่งสัญญาณอ่านไปยังหน่วยความจํา
- คําสั่งที่แอดเดรสหน่วยความจํานั้นจะถูกวางไว้ใน MDR
- เนื้อหา MDR จะถูกถ่ายโอนไปยัง IR
- พีซีจะเพิ่มขึ้นเพื่อชี้ไปยังคําสั่งถัดไป
ตัวอย่าง:
คําแนะนํา: โหลด 500
พีซี = 100
หน่วยความจํา IR ←[100]
พีซี ← พีซี + 1
หลังจากรอบนี้ IR จะมีคําสั่ง LOAD 500 ตอนนี้พีซีชี้ไปที่คําสั่งถัดไป
วงจรถอดรหัส
ในรอบการถอดรหัส ชุดควบคุมจะตีความคําสั่งที่ดึงมาซึ่งจัดเก็บไว้ใน IR
ขั้นตอนในวงจรถอดรหัส:
- ชุดควบคุมตรวจสอบส่วน opcode ของคําสั่ง
- กําหนดการดําเนินการที่จะดําเนินการ
- ระบุตัวถูกดําเนินการหรือรีจิสเตอร์ที่เกี่ยวข้อง
ตัวอย่าง:
IR = โหลด 500
หน่วยควบคุม:
Opcode = โหลด
ตัวถูกดําเนินการ = 500
ที่นี่ LOAD บ่งบอกถึงการทํางาน 500 คือที่อยู่ของข้อมูลที่จะโหลด
ดําเนินการวงจร
สุดท้าย Execute Cycle จะดําเนินการจริงที่กําหนดในระหว่างขั้นตอนการถอดรหัส
ขั้นตอนในวงจรการดําเนินการ:
- CPU จะดําเนินการขึ้นอยู่กับ opcode
- ดําเนินการทางคณิตศาสตร์หรือตรรกะผ่าน ALU
- ถ่ายโอนข้อมูลระหว่างหน่วยความจําและรีจิสเตอร์
- เปลี่ยนลําดับการดําเนินการ (เช่น คําแนะนําในการกระโดด)
ตัวอย่าง:
โหลด 500
หน่วยความจํา←สะสม[500]
หลังจากดําเนินการวงจรสามารถเริ่มต้นอีกครั้งด้วยคําสั่งถัดไป
ความท้าทายในการดําเนินการคําสั่ง CPU สมัยใหม่
แม้ว่าวงจร Fetch–Decode–Execute จะเป็นรากฐานของการทํางานของ CPU แต่โปรเซสเซอร์สมัยใหม่ต้องเผชิญกับความท้าทายหลายประการเมื่อดําเนินการหลายคําสั่งอย่างมีประสิทธิภาพ ปัญหาเหล่านี้อาจส่งผลต่อประสิทธิภาพ ปริมาณงาน และประสิทธิภาพของระบบโดยรวม
1. อันตรายจากท่อ
Pipelining เป็นเทคนิคที่ใช้ในการปรับปรุงปริมาณงานคําสั่งโดยการทับซ้อนกันการดําเนินการหลายคําสั่ง
อย่างไรก็ตาม อันตรายจากท่อส่งจะเกิดขึ้นเมื่อ:
- คําสั่งหนึ่งขึ้นอยู่กับผลลัพธ์ของคําสั่งก่อนหน้า
- มีการเปลี่ยนแปลงโฟลว์การควบคุม (เช่น สาขา)
- ทรัพยากรฮาร์ดแวร์ไม่พร้อมใช้งานสําหรับขั้นตอนไปป์ไลน์ทั้งหมด
สิ่งนี้นําไปสู่การหยุดชะงักหรือฟองอากาศในท่อส่ง ซึ่งทําให้ประสิทธิภาพลดลงในที่สุด
2. ข้อผิดพลาดในการคาดการณ์สาขา
การคาดการณ์สาขาช่วยให้ CPU คาดเดาผลลัพธ์ของคําสั่งสาขาแบบมีเงื่อนไขเพื่อให้ไปป์ไลน์ทํางานได้อย่างราบรื่น
แต่ถ้าการคาดการณ์ไม่ถูกต้องโปรเซสเซอร์จะต้อง:
- ล้างคําแนะนําที่ไม่ถูกต้องออกจากท่อ
- ดึงเส้นทางคําสั่งที่ถูกต้อง
ส่งผลให้วงจรสูญเปล่าและประสิทธิภาพการดําเนินการลดลง
3. แคชคําสั่งพลาด
แคชคําสั่งเป็นหน่วยความจําความเร็วสูงขนาดเล็กที่ใช้ในการจัดเก็บคําสั่งที่เข้าถึงบ่อย
เมื่อไม่พบคําแนะนําที่จําเป็นในแคช:
- ต้องดึงมาจากหน่วยความจําหลักซึ่งช้ากว่า
- สิ่งนี้นําไปสู่ความล่าช้าและท่อส่งหยุดชะงัก
อัตราการพลาดแคชที่สูงอาจทําให้ประสิทธิภาพของ CPU ลดลงอย่างมาก
4. ข้อจํากัดของ Instruction-Level Parallelism (ILP)
Instruction-Level Parallelism ช่วยให้ CPU สามารถดําเนินการหลายคําสั่งพร้อมกันได้
อย่างไรก็ตาม:
- คําสั่งบางคําสั่งไม่ได้เป็นอิสระหรือขนานกันได้
- การพึ่งพาข้อมูลและโฟลว์การควบคุมมักจะจํากัดการดําเนินการแบบขนาน
ด้วยเหตุนี้ ILP จึงมีข้อจํากัดในทางปฏิบัติ ซึ่งนอกเหนือจากการเพิ่มฮาร์ดแวร์เพิ่มเติมจะไม่ให้การเร่งความเร็วอย่างมีนัยสําคัญ
5. การแย่งชิงทรัพยากร
เมื่อคําสั่งหลายคําสั่ง compete สําหรับทรัพยากร CPU เดียวกัน (เช่น รีจิสเตอร์ พอร์ตหน่วยความจํา หน่วย ALU):
- การดําเนินการต้องรอจนกว่าทรัพยากรจะพร้อมใช้งาน
- สิ่งนี้สร้างปัญหาคอขวดและทําให้ไปป์ไลน์ช้าลง
การจัดกําหนดการทรัพยากรและการออกแบบฮาร์ดแวร์ที่มีประสิทธิภาพช่วยลดปัญหานี้ให้เหลือน้อยที่สุด


ผลิตภัณฑ์
March 12, 2026
วงจรการทำงานของคำสั่งหลัก
ค้นพบวิธีที่โปรเซสเซอร์ของคุณดึงข้อมูล ถอดรหัส และดําเนินการทุกคําสั่งในพริบตา
by
นักเขียนบทความ

