
ผลิตภัณฑ์
19
Jan
การรับรู้แบบหลายโหมดในปัญญาประดิษฐ์เชิงกายภาพคืออะไร?
ค้นพบวิธีที่การผสานรวมข้อมูลจากเซ็นเซอร์ที่หลากหลายช่วยนำความสามารถในการรับรู้ที่คล้ายมนุษย์มาสู่ปัญญาประดิษฐ์เชิงกายภาพ (Physical AI)

การตรวจจับหลายรูปแบบใน AI ทางกายภาพ (PAI) ซึ่งบางครั้งเรียกว่า AI ที่เป็นตัวเป็นตน คือความสามารถของ AI ในการหลอมรวมอินพุตทางประสาทสัมผัสที่หลากหลาย เช่น การมองเห็น เสียง การสัมผัส ลิดาร์ ข้อความ และอื่นๆ จากสภาพแวดล้อมเพื่อสร้างการรับรู้สถานการณ์ที่สมบูรณ์และสมบูรณ์ยิ่งขึ้น
การประยุกต์ใช้หลักของการตรวจจับหลายรูปแบบสําหรับ PAI คือ AI เชิงพื้นที่ (SAI) ที่ช่วยให้เครื่องจักร เช่น หุ่นยนต์อัตโนมัติสามารถเข้าใจและนําทางสภาพแวดล้อม 3 มิติแบบไดนามิกได้แบบเรียลไทม์ ซึ่งตรงกันข้ามกับการจดจําและการจําแนกประเภทภาพทั่วไป ซึ่งจํากัดเฉพาะแอปพลิเคชัน 2 มิติ
Multimodal AI ช่วยให้หุ่นยนต์หรือยานพาหนะไร้คนขับสามารถโต้ตอบกับสภาพแวดล้อมได้อย่างเป็นธรรมชาติโดยการตีความสัญญาณที่ซับซ้อน เช่น ข้อมูลภาพและคําสั่งพูดพร้อมกัน ความสามารถในการปรับให้เข้ากับสภาวะที่เปลี่ยนแปลงแบบเรียลไทม์ช่วยเพิ่มความยืดหยุ่น ความน่าเชื่อถือ และความปลอดภัย
เป้าหมายของ SAI คือการเลียนแบบการรับรู้และความเข้าใจของมนุษย์อย่างใกล้ชิดปูทางไปสู่ปฏิสัมพันธ์ระหว่างมนุษย์กับเครื่องจักรที่ใช้งานง่ายและเป็นธรรมชาติมากขึ้น สถาปัตยกรรม AI แบบมัลติโมดอลที่จําเป็นในการรองรับ SAI โดยทั่วไปประกอบด้วยบล็อกการทํางานสามบล็อก รวมถึงโมดูลอินพุต โมดูลฟิวชั่น และโมดูลเอาต์พุต (รูป 1)
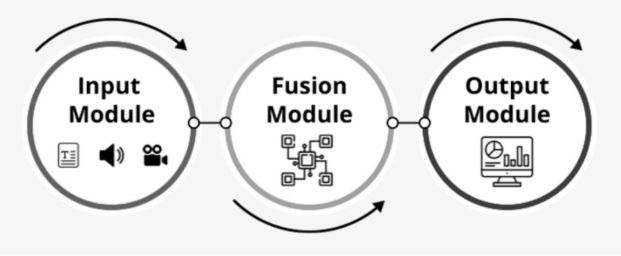
การใช้การตรวจจับแบบหลายรูปแบบช่วยให้ระบบสามารถทํางานที่ซับซ้อนซึ่งไม่สามารถทําได้โดยใช้เซ็นเซอร์ประเภทเดียว เริ่มต้นด้วยโมดูลอินพุตที่โดยทั่วไปจะมีชุดโครงข่ายประสาทเทียมแบบ unimodal หนึ่งชุดสําหรับเซ็นเซอร์แต่ละตัว ตัวอย่างเช่น LIDAR และกล้องสามารถให้ข้อมูลเสริมได้
เทคนิค AI สําหรับ LIDAR มุ่งเน้นไปที่การประมวลผลพอยต์คลาวด์ 3 มิติที่ไม่มีโครงสร้างเพื่อความเข้าใจเชิงพื้นที่ เรขาคณิต และความลึกที่แม่นยํา โดยทั่วไป AI สําหรับอินพุตของกล้องจะใช้โครงข่ายประสาทเทียมแบบ 2 มิติ (CNN) เพื่อดึงข้อมูลพื้นผิว สี และความหมายจากภาพพิกเซลที่หนาแน่น โดยเน้นที่การจําแนกประเภทพิกเซลที่ชาญฉลาด
ฟิวชั่นเซ็นเซอร์อาจซับซ้อน
การรับข้อมูลเซ็นเซอร์แบบโมงเดียวจะตามด้วยการหลอมรวมอินพุตเหล่านั้นเป็นโมเดลเดียวซึ่งประกอบด้วยหลายรูปแบบ มันไม่ง่ายเหมือนการรวมอินพุตต่างๆ ทั้งหมด กุญแจสําคัญคือการหลอมรวมเฉพาะอินพุตที่เกี่ยวข้องจากรูปแบบต่างๆ และรวมเข้าด้วยกันในลักษณะที่เหมาะสมที่สุด
ซึ่งช่วยให้สามารถใช้ประโยชน์จากความแข็งแกร่งของแต่ละรูปแบบและเพิ่มผลลัพธ์ของกระบวนการหลอมรวมให้สูงสุด อาจเกี่ยวข้องกับเครื่องมือง่ายๆ เช่น การต่อกันหรือเทคนิคขั้นสูง เช่น โมเดล AI ของหม้อแปลง เทคนิคการหลอมรวมที่แตกต่างกันเหมาะสําหรับการใช้งาน PAI เฉพาะ:
- การรับรู้สถานการณ์มักต้องใช้เทคนิคต่างๆ เช่น เครือข่าย Bayesian เพื่อจัดการกับความไม่แน่นอน ในขณะที่ตัวกรองการเรียนรู้เชิงลึกจะจัดการการจดจําวัตถุจากการรวมกันของ LIDAR, เรดาร์ และกล้อง
- แอปพลิเคชันการนําทางมีแนวโน้มที่จะใช้ตัวกรอง Kalman สําหรับการหลอมรวมหน่วยวัดแรงเฉื่อย (IMU) และตัวเข้ารหัสล้อเพื่อการแปลและการทําแผนที่ที่แม่นยํา และสนับสนุนการทํางานในสภาพแวดล้อมที่ซับซ้อน
- หุ่นยนต์กริปเปอร์สามารถใช้ประโยชน์จากโครงข่ายประสาทเทียมแบบ Radial Basis Function (RBF) ที่ให้การประมาณฟังก์ชันแบบไม่เชิงเส้นที่รวดเร็ว แม่นยํา และแข็งแกร่ง เพื่อรวมข้อมูลจากเซ็นเซอร์หลายตัว เช่น เซ็นเซอร์แรง/แรงบิด (สเตรนเกจ) เซ็นเซอร์อุปนัย/โฟโตอิเล็กทริกสําหรับการตรวจจับสิ่งของ และเซ็นเซอร์สัมผัสสําหรับการตรวจจับพื้นผิวและการลื่นไถล
เมื่ออินพุตเซ็นเซอร์ต่างๆ ถูกหลอมรวมในลักษณะที่เหมาะสมกับการใช้งานเฉพาะแล้ว โมดูลเอาต์พุตจะสร้างการคาดการณ์ขั้นสุดท้ายในรูปแบบที่เหมาะสมกับงาน ซึ่งอาจรวมถึงการควบคุมความเร็วและทิศทางของการเคลื่อนที่ปริมาณแรงที่ใช้ความสว่างหรือความถี่ของพัลส์เลเซอร์และพารามิเตอร์ทางกายภาพอื่น ๆ
เจาะลึกลงไป
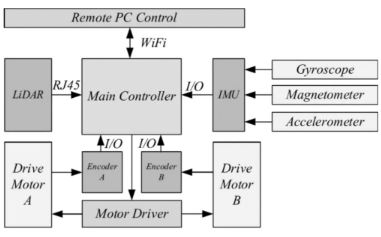
การใช้งานระบบ PAI ที่ใช้ฟิวชั่นเซ็นเซอร์อาจเป็นเรื่องที่ท้าทายและเกี่ยวข้องกับการแลกเปลี่ยนเซ็นเซอร์ คอนโทรลเลอร์หลายตัว และตัวแปลงพลังงาน (รูป 2)
ข้อควรพิจารณาที่ลึกซึ้งกว่าหลายประการ ได้แก่:
- ฟิวชั่นสามารถเกิดขึ้นได้ที่ระดับข้อมูลหรือระดับการตัดสินใจของระบบ การหลอมรวมระดับข้อมูลจะรวมข้อมูลดิบจากเซ็นเซอร์ต่างๆ เข้าด้วยกัน ซึ่งส่งผลให้มีการป้อนข้อมูลโดยละเอียด ในขณะที่การหลอมรวมระดับการตัดสินใจจะรวมข้อมูลที่กรองจากเซ็นเซอร์แต่ละตัว และมีประสิทธิภาพมากขึ้น แต่มีรายละเอียดน้อยกว่า
- การปรับสมดุลการตรวจจับเสริมและซ้ําซ้อน การใช้เซ็นเซอร์เสริม เช่น เรดาร์ LIDAR และกล้องสามารถสร้างเอาต์พุตที่สมบูรณ์ยิ่งขึ้น ในขณะที่การใช้เซ็นเซอร์ซ้ําซ้อนรองรับความน่าเชื่อถือของระบบที่สูงขึ้น
- การลดเสียงรบกวนจากสิ่งแวดล้อมมักเป็นข้อพิจารณาที่สําคัญ ข้อมูลเซ็นเซอร์จริงอาจได้รับผลกระทบจากสภาพแวดล้อม และจําเป็นต้องมีอัลกอริทึมแยกต่างหากเพื่อกรองสัญญาณรบกวน ทําให้ระบบสามารถระบุสัญญาณจริงได้ นอกจากนี้ยังอาจกําหนดให้ต้องชั่งน้ําหนักข้อมูลของเซ็นเซอร์แต่ละตัวเพื่อพิจารณาความไม่แน่นอนที่เกิดจากสิ่งแวดล้อม
- จําเป็นต้องมีการจัดตําแหน่งที่แม่นยําโดยใช้การสอบเทียบชั่วคราวและเชิงพื้นที่เพื่อรับประกันว่าข้อมูลจากเซ็นเซอร์ต่างๆ ซึ่งมักจะมีเวลาแฝงต่างกันและในตําแหน่งต่างๆ บนแพลตฟอร์ม PAI จะมองเห็นภาพจุดเดียวกันในเวลาและพื้นที่ได้อย่างแม่นยํา
สรุป
การตรวจจับหลายรูปแบบสามารถใช้เพื่อสนับสนุนความเข้าใจที่เหมือนมนุษย์ที่จําเป็นสําหรับการทํางานของ PAI ในยานยนต์ไร้คนขับ หุ่นยนต์ และการใช้งานในโลกแห่งความเป็นจริงอื่นๆ นอกจากนี้ยังรองรับ SAI ที่ให้การรับรู้สถานการณ์ การใช้การตรวจจับแบบหลายรูปแบบในระบบ PAI เกี่ยวข้องกับการแลกเปลี่ยนในประสิทธิภาพและการประมวลผลของเซ็นเซอร์ และการใช้ตัวควบคุมและตัวแปลงพลังงานหลายตัว


ผลิตภัณฑ์
May 21, 2026
การรับรู้แบบหลายโหมดในปัญญาประดิษฐ์เชิงกายภาพคืออะไร?
ค้นพบวิธีที่การผสานรวมข้อมูลจากเซ็นเซอร์ที่หลากหลายช่วยนำความสามารถในการรับรู้ที่คล้ายมนุษย์มาสู่ปัญญาประดิษฐ์เชิงกายภาพ (Physical AI)
by
นักเขียนบทความ

