
ผลิตภัณฑ์
19
Jan
ทำความเข้าใจเกี่ยวกับการเปลี่ยนอุปกรณ์ขณะทำงาน (Hot Swap): ตัวอย่างกระบวนการออกแบบวงจร Hot-Swap
เรียนรู้วิธีการออกแบบวงจรถอดเปลี่ยนอุปกรณ์ขณะทำงานที่มีความทนทานสูง เพื่อปกป้องฮาร์ดแวร์ระหว่างการเสียบใช้งานในขณะที่อุปกรณ์ยังทำงานอยู่
การแนะนำ
ระบบที่มีความพร้อมใช้งานสูงเช่น เซิร์ฟเวอร์ สวิตช์เครือข่าย ระบบจัดเก็บข้อมูลแบบ RAID (Redundant-Array of Independent-Disk) และโครงสร้างพื้นฐานการสื่อสารรูปแบบอื่นๆ จำเป็นต้องได้รับการออกแบบให้มีเวลาหยุดทำงานเกือบเป็นศูนย์ตลอดอายุการใช้งาน หากส่วนประกอบใดของระบบดังกล่าวล้มเหลวหรือต้องการการอัปเดต จะต้องเปลี่ยนส่วนประกอบนั้นโดยไม่ขัดจังหวะการทำงานของระบบส่วนที่เหลือ จะต้องถอดแผงวงจรหรือโมดูลออก และเสียบส่วนประกอบใหม่เข้าไปแทนที่ ในขณะที่ระบบยังคงทำงานอยู่ กระบวนการนี้เรียกว่า การถอดเปลี่ยนขณะทำงาน ( Hot Swapping ) หรือในบางกรณีเรียก ว่า การเสียบขณะทำงาน (Hot Plugging ) (ซึ่งโมดูลจะทำงานร่วมกับซอฟต์แวร์ของระบบ) เพื่อความปลอดภัยในการถอดเปลี่ยนขณะทำงาน มักใช้ขั้วต่อที่มีขาเรียงสลับกันเพื่อให้แน่ใจว่ามีการต่อสายดินและจ่ายไฟในพื้นที่ก่อนที่จะทำการเชื่อมต่ออื่นๆ นอกจากนี้ แผงวงจรพิมพ์ (PCB) หรือโมดูลแบบเสียบแต่ละตัวจะมีตัวควบคุมการถอดเปลี่ยน ขณะทำงานในตัว เพื่ออำนวยความสะดวกในการถอดและเสียบโมดูลออกจากแผงวงจรหลักที่กำลังทำงานอยู่ได้อย่างปลอดภัย ในระหว่างการทำงาน ตัวควบคุมยังให้การป้องกันอย่างต่อเนื่องจากไฟฟ้าลัดวงจรและกระแสไฟเกินอีกด้วย
แม้ว่ากระแสไฟฟ้าที่ต้องถูกตัดและเริ่มต้นใหม่จะมีขนาดใหญ่ แต่รายละเอียดปลีกย่อยบางอย่างของการออกแบบกระแสไฟฟ้าสูงมักไม่ได้รับการพิจารณาอย่างเพียงพอ เนื่องจาก “รายละเอียดเล็กๆ น้อยๆ คือสิ่งสำคัญ” บทความนี้จะมุ่งเน้นไปที่หน้าที่และความสำคัญของส่วนประกอบต่างๆ ในวงจรควบคุมการสลับอุปกรณ์ขณะทำงาน (hot-swap control circuit) และจะให้รายละเอียดเชิงลึกเกี่ยวกับการพิจารณาในการออกแบบและเกณฑ์การเลือกส่วนประกอบที่เหมาะสมที่สุดในกระบวนการออกแบบ โดยใช้ตัวควบคุม hot-swap รุ่นADM1177 ของ Analog Devices
โครงสร้างแบบ Hot-Swap
ระดับแรงดันไฟสองระดับที่พบได้ทั่วไปในระบบที่มีความพร้อมใช้งานสูง ได้แก่ –48 V และ +12 V นั้น ใช้การกำหนดค่าที่แตกต่างกันสำหรับการป้องกันการเปลี่ยนอุปกรณ์ขณะทำงาน (hot-swap protection) ระบบ –48 V ใช้การควบคุมการเปลี่ยนอุปกรณ์ขณะทำงานด้านแรงดันต่ำ (lower-side hot-swap control) และ pass-MOSFET ในขณะที่ระบบ +12 V ใช้ตัวควบคุมด้านแรงดันสูง (high-side controller) และ pass-MOSFET
แนวคิดแรงดัน -48 โวลต์ มีต้นกำเนิดมาจากเทคโนโลยีระบบแลกเปลี่ยนโทรคมนาคมแบบดั้งเดิม ตัวอย่างเช่น ระบบ Advanced Telecommunications Computing Architecture (ATCA) เครือข่ายใยแก้วนำแสง สถานีฐาน และเซิร์ฟเวอร์แบบเบลด แรงดัน 48 โวลต์ ซึ่งได้มาจากแบตเตอรี่ทั่วไป ถูกเลือกใช้เพราะสามารถส่งพลังงานและสัญญาณได้ในระยะทางไกลโดยไม่สูญเสียอย่างมีนัยสำคัญ แต่ระดับแรงดันก็ไม่สูงพอที่จะเสี่ยงต่อการถูกไฟฟ้าช็อตอย่างรุนแรงในสภาวะปกติ ส่วนขั้วลบนั้นถูกเลือกใช้เพราะในสภาวะที่มีความชื้นเมื่อสัมผัสกับสภาพแวดล้อม การเคลื่อนที่ของไอออนโลหะจากขั้วบวกไปยังขั้วลบจะกัดกร่อนน้อยกว่ามากเมื่อขั้วบวกต่อลงดิน
อย่างไรก็ตาม ในระบบสื่อสารข้อมูลที่ระยะทางไม่ใช่ปัจจัยสำคัญ แหล่งจ่ายไฟ +12 โวลต์จึงเหมาะสมกว่า ทำให้เป็นที่นิยมในการออกแบบเซิร์ฟเวอร์แบบเบลดและระบบเครือข่าย บทความนี้จะเน้นที่ระบบ +12 โวลต์เป็นหลัก
กิจกรรม Hot-Swap
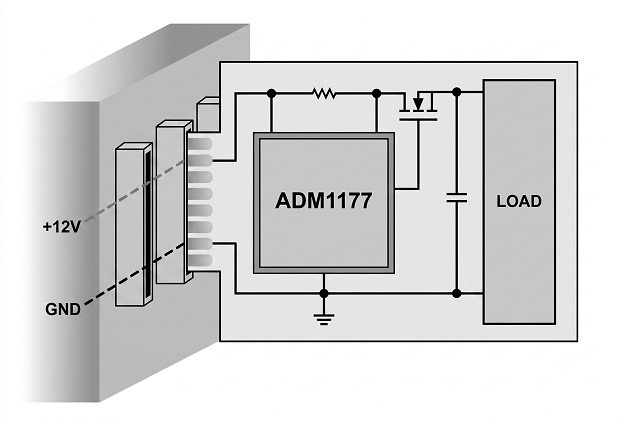
ลองพิจารณาระบบที่มีแผงวงจรหลัก 12 โวลต์และแร็คโมดูลแบบถอดได้ แต่ละโมดูลจะต้องสามารถถอดและเปลี่ยนได้โดยไม่ส่งผลกระทบต่อการทำงานปกติของโมดูลที่อยู่ติดกันในแร็ค ในกรณีที่ไม่มีตัวควบคุม แต่ละโมดูลอาจมีค่าความจุโหลดต่อสายจ่ายไฟค่อนข้างมาก โดยปกติจะมีค่าอยู่ในระดับมิลลิฟารัด เมื่อเสียบโมดูลเข้าไปครั้งแรก ตัวเก็บประจุที่ยังไม่ถูกชาร์จจะต้องการกระแสไฟฟ้ามากที่สุดเท่าที่จะเป็นไปได้เพื่อชาร์จโหลด หากกระแสไฟกระชาก นี้ ไม่ถูกจำกัด อาจทำให้แรงดันไฟฟ้าที่ขั้วลดลง ส่งผลให้เกิดไฟตกอย่างรุนแรงบนแผงวงจรหลัก รีเซ็ตโมดูลที่อยู่ติดกันหลายตัวในระบบ และอาจทำให้ขั้วต่อของโมดูลเสียหายเนื่องจากกระแสไฟเริ่มต้นสูง
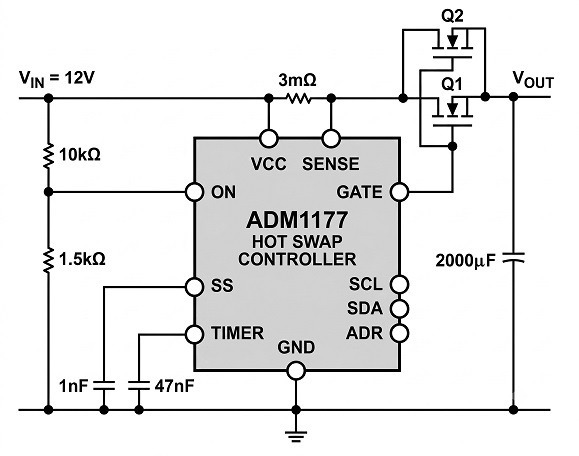
ปัญหานี้สามารถแก้ไขได้ด้วยตัวควบคุมการถอดเปลี่ยนขณะทำงาน (Hot-swap controller ) (รูปที่ 1) ซึ่งจะควบคุมกระแสไฟกระชากอย่างระมัดระวังเพื่อให้มั่นใจถึงช่วงเวลาการเปิดเครื่องที่ปลอดภัย ตัวควบคุมการถอดเปลี่ยนขณะทำงานจะตรวจสอบกระแสไฟที่จ่ายอย่างต่อเนื่องหลังจากเปิดเครื่องเพื่อป้องกันการลัดวงจรและสภาวะกระแสไฟเกินในระหว่างการทำงานปกติ
ตัวควบคุม Hot-Swap
ตัวควบคุมการถอดเปลี่ยนขณะทำงาน ADM1177 ประกอบด้วยส่วนประกอบหลักสามส่วน (รูปที่ 2): MOSFET ชนิด N-channel ที่ทำหน้าที่เป็นสวิตช์ควบคุมกำลังไฟฟ้าหลัก ตัวต้านทานตรวจจับกระแส และตัวควบคุมการถอดเปลี่ยนขณะทำงาน ซึ่งรวมถึงแอมพลิฟายเออร์ตรวจจับกระแส เพื่อควบคุมกระแสผ่านของ MOSFET ให้ครบวงจร
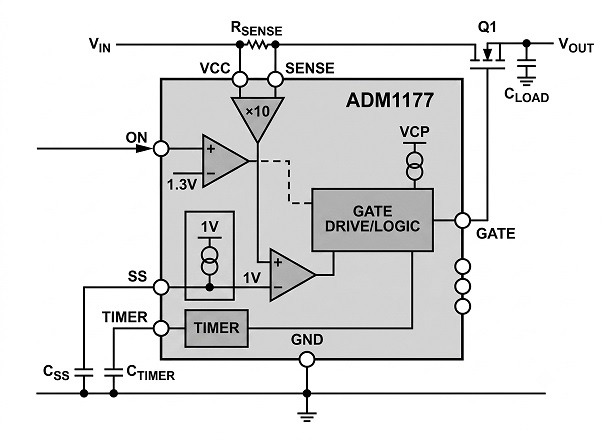
ภายในตัวควบคุมแบบถอดเปลี่ยนขณะทำงาน (hot-swap controller) วงจรขยายสัญญาณกระแส (current-sense amplifier) จะตรวจสอบแรงดันตกคร่อมตัวต้านทานตรวจจับภายนอก แรงดันเล็กน้อยนี้ (โดยทั่วไปอยู่ในช่วง 0 mV ถึง 100 mV) จะต้องถูกขยายให้มีระดับที่ใช้งานได้ อัตราขยายของวงจรขยายใน ADM1177 คือ 10 ดังนั้น ตัวอย่างเช่น แรงดันตกคร่อม 100 mV ที่เกิดจากกระแสไฟฟ้าปริมาณหนึ่งจะถูกขยายเป็น 1 V แรงดันนี้จะถูกเปรียบเทียบกับแรงดันอ้างอิงคงที่หรือแปรผันได้ หากใช้แรงดันอ้างอิง 1 V กระแสไฟฟ้าที่ทำให้เกิดแรงดันมากกว่า 100 mV (±3%) ตกคร่อมตัวต้านทานแบบขนาน จะทำให้ตัวเปรียบเทียบแสดงสัญญาณกระแสเกิน ดังนั้น จุดตัดกระแสสูงสุดจึงถูกกำหนดโดยหลักๆ จากความต้านทานของตัวต้านทานแบบขนาน อัตราขยายของวงจรขยาย และแรงดันอ้างอิง ค่าความต้านทานของตัวต้านทานแบบขนานจะเป็นตัวกำหนดกระแสสูงสุด วงจรจับเวลา (TIMER)จะกำหนดขีดจำกัดระยะเวลาที่สภาวะกระแสเกินที่กำหนดสามารถเกิดขึ้นได้
ไอซี ADM1177 มี ฟังก์ชัน ซอฟต์สตาร์ทซึ่งจะค่อยๆ เพิ่มแรงดันอ้างอิงกระแสเกินอย่างเป็นเส้นตรง แทนที่จะเปิดใช้งานอย่างฉับพลัน ทำให้กระแสโหลดเปลี่ยนแปลงตามไปด้วย การทำงานนี้ทำได้โดยการป้อนกระแสจากแหล่งจ่ายกระแสภายในเข้าไปในตัวเก็บประจุภายนอก (ขา SS) เพื่อค่อยๆ เพิ่มแรงดันอ้างอิงของตัวเปรียบเทียบจาก 0 V เป็น 1 V ตัวเก็บประจุ SS ภายนอกจะกำหนดอัตราการเพิ่มแรงดันนี้ หากจำเป็น สามารถขับแรงดันไปยังขา SS โดยตรงเพื่อกำหนดขีดจำกัดกระแสสูงสุดได้
วงจรเปิด (ON circuit) ซึ่งประกอบด้วยวงจรเปรียบเทียบและวงจรอ้างอิง จะเปิดใช้งานอุปกรณ์ โดยจะตั้งค่าแรงดันไฟฟ้าที่แหล่งจ่ายไฟต้องถึงเพื่อให้ตัวควบคุมทำงานได้ เมื่ออุปกรณ์ทำงานแล้ว ขาเกตจะเริ่มชาร์จ แรงดันไฟฟ้าที่ขาเกตของ MOSFET ชนิด N-channel ที่ใช้ในวงจรประเภทนี้จะต้องสูงกว่าแรงดันไฟฟ้าที่แหล่งกำเนิด เพื่อให้ได้ค่านี้ในช่วงแรงดันไฟฟ้าของแหล่งจ่ายไฟ (VCC) ตัวควบคุมแบบ hot-swap จึงมีวงจรปั๊มประจุในตัวที่สามารถรักษาแรงดันไฟฟ้าที่ขา GATE ให้สูงกว่า VCC ได้มากถึง 10 V ขา GATE ต้องการกระแส pull-up ที่เกิดจากการปั๊มประจุเพื่อเปิดใช้งาน MOSFET และกระแส pull-down เพื่อปิดใช้งาน MOSFET เมื่อจำเป็น กระแส pull-down ที่อ่อนจะใช้สำหรับการควบคุม และกระแส pull-down ที่แรงกว่าจะใช้เพื่อปิดใช้งาน MOSFET อย่างรวดเร็วในกรณีที่เกิดการลัดวงจร
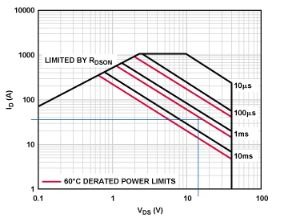
ส่วนประกอบสำคัญสุดท้ายของตัวควบคุมการสลับอุปกรณ์ขณะทำงานคือตัวจับเวลา (TIMER)ซึ่งทำหน้าที่จำกัดระยะเวลาที่กระแสไฟฟ้าอยู่ในช่วงควบคุมระหว่างเหตุการณ์กระแสเกิน MOSFET ถูกออกแบบมาให้ทนต่อกำลังไฟฟ้าในปริมาณที่กำหนดในช่วงเวลาสูงสุดที่กำหนดไว้ ผู้ผลิต MOSFET จะระบุช่วงเวลานี้ หรือพื้นที่การทำงานที่ปลอดภัย (SOA) โดยใช้กราฟดังที่แสดงในรูปที่ 3
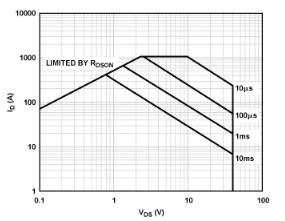
กราฟ SOA แสดงความสัมพันธ์ระหว่างแรงดันรวมระหว่างขั้วเดรนและซอร์ส กระแสเดรน และระยะเวลาที่ MOSFET สามารถทนต่อการสูญเสียพลังงานนี้ได้ ตัวอย่างเช่น MOSFET ในรูปที่ 3 สามารถทนต่อแรงดัน 10 V และกระแส 85 A (850 W) ได้เป็นเวลา 1 มิลลิวินาที หากสภาวะนี้เกิดขึ้นนานกว่านั้น MOSFET จะเสียหาย วงจร TIMER สามารถช่วยจำกัดระยะเวลาที่ MOSFET ต้องเผชิญกับสภาวะที่เลวร้ายที่สุดเหล่านี้ได้ โดยขึ้นอยู่กับตัวเก็บประจุภายนอกของ TIMER ตัวอย่างเช่น หากตั้งค่า TIMER ไว้ที่ 1 มิลลิวินาที และกระแสเกินขีดจำกัดนานกว่า 1 มิลลิวินาที วงจรจะหมดเวลาและปิดการทำงานของ MOSFET
ใน ADM1177 เพื่อให้มีระยะปลอดภัย แรงดันไฟฟ้ากระตุ้นการทำงานของตัวจับเวลา (TIMER) ถูกตั้งค่าไว้ที่ 92 mV ดังนั้น ตัวควบคุมการสลับอุปกรณ์ขณะทำงาน (hot-swap controller) จะเริ่มจับเวลาการไหลของกระแสอย่างระมัดระวังเมื่อแรงดันไฟฟ้าตรวจจับเข้าใกล้ค่าที่กำหนดไว้ที่ 100 mV
ตัวอย่างการออกแบบ
เนื่องจากความยืดหยุ่นที่ได้รับจากการออกแบบตัวควบคุมเช่น ADM1177 จึงอาจเป็นประโยชน์ที่จะสาธิตวิธีการนำไปใช้ในตัวอย่างการออกแบบ Hot-Swap 12 โวลต์ โดยสมมติเงื่อนไขต่อไปนี้สำหรับตัวอย่างนี้:
ตัวควบคุมคือ ADM1177
- VIN = 12 V (±10%)
- VMAX = 13.2 V
- ITRIP = 30 A
- CLOAD = 2000 μF
- V ON = 10 V (ระดับแรงดันไฟเลี้ยงที่เหมาะสมสำหรับการเปิดใช้งานตัวควบคุม)
- I POWERUP = 1 A (กระแสไบแอส DC ที่โหลดต้องการระหว่างการเปิดเครื่อง)
เพื่อความง่ายในการอธิบาย การคำนวณจึงไม่รวมผลกระทบของค่าความคลาดเคลื่อนของชิ้นส่วน ซึ่งแน่นอนว่าควรพิจารณาค่าความคลาดเคลื่อนเหล่านี้เมื่อออกแบบเพื่อรับมือกับสภาวะที่เลวร้ายที่สุด
พินออน
ก่อนอื่นให้พิจารณาเงื่อนไขในการเปิดใช้งานตัวควบคุมเมื่อแรงดันไฟฟ้าที่จ่ายเกิน 10 V หากค่าเกณฑ์ของขา ON คือ 1.3 V อัตราส่วนการแบ่งแรงดันจาก V INไปยังขา ON จะต้องเป็น 0.13:1 เพื่อความแม่นยำ ควรคำนึงถึงกระแสรั่วไหลของขาเมื่อเลือกค่าความต้านทานของวงจร
วงจรแบ่งแรงดันแบบใช้ตัวต้านทานขนาด 10 กิโลโอห์มและ 1.5 กิโลโอห์ม จะมีอัตราส่วนที่เหมาะสมเท่ากับ 0.130
การเลือกตัวต้านทานตรวจจับ
ตัวต้านทานตรวจจับจะถูกเลือกโดยพิจารณาจากกระแสโหลดที่จำเป็นในการเริ่มการทำงานของตัวจับเวลา
โดยที่VSENSETIMER = 92 mV
กำลังไฟฟ้าสูงสุดที่ตัวต้านทานตรวจจับสามารถกระจายได้ที่กระแส 30 A คือ
ดังนั้นตัวต้านทานตรวจจับควรสามารถรองรับกำลังไฟได้ 3 วัตต์ หากไม่มีตัวต้านทานตัวเดียวที่มีกำลังไฟหรือความต้านทานที่ถูกต้อง ตัวต้านทานตรวจจับสามารถสร้างขึ้นได้จากตัวต้านทานหลายตัว
เวลาในการชาร์จความจุโหลด
ต้องกำหนดเวลาที่ใช้ในการชาร์จตัวเก็บประจุโหลดก่อนที่จะเลือก MOSFET ใน ช่วง เริ่มต้นการทำงาน ตัวควบคุมมักจะถึงขีดจำกัดกระแสเนื่องจากกระแสไฟกระชากที่เกิดจากตัวเก็บประจุโหลด หากเวลาที่ตั้งไว้โดยขา TIMER ไม่เพียงพอที่จะทำให้ตัวเก็บประจุโหลดชาร์จเต็ม MOSFET จะถูกปิดใช้งานและระบบจะไม่สามารถเปิดใช้งานได้ เราสามารถใช้สมการต่อไปนี้เพื่อกำหนดค่าที่เหมาะสม:
โดยที่VREGMIN = 97 mV คือแรงดันไฟฟ้าควบคุมขั้นต่ำของตัวควบคุมการเปลี่ยนอุปกรณ์ขณะทำงาน (Hot-swap controller)
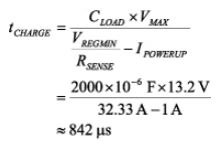
สมการนี้สมมติสภาวะอุดมคติของการเปลี่ยนแปลงกระแสโหลดจาก 0 A เป็น 30 A อย่างฉับพลัน ในความเป็นจริง ประจุที่เกต QGS ของ MOSFET ขนาดใหญ่จะทำหน้าที่จำกัดอัตราการเปลี่ยนแปลงของแรงดันเกต—และด้วยเหตุนี้จึงจำกัดโปรไฟล์กระแสเปิดเครื่อง—เพื่อให้มีปริมาณประจุถูกส่งไปยังตัวเก็บประจุโหลดโดยไม่กระตุ้นฟังก์ชัน TIMER ในรูปที่ 4 MOSFET ที่มี QGS สูงกว่าจะทำให้ TIMER ทำงานในช่วงเวลาที่สั้นกว่า คือ T1 ถึง T3 เมื่อเทียบกับ MOSFET ที่มี QGS ต่ำกว่าซึ่งทำให้ตัวจับเวลาทำงานในช่วงเวลา T0 ถึง T2
เนื่องจากประจุที่ส่งผ่านระหว่าง T0 และ T1 สะสมในอัตราที่ต่ำกว่าขีดจำกัดกระแส ดังนั้นเวลาที่คำนวณได้จึงสามารถลดลงได้ตามไปด้วย ปริมาณนี้ยากที่จะระบุได้อย่างแม่นยำ เนื่องจากขึ้นอยู่กับกระแสเกตของตัวควบคุมและคุณสมบัติของ MOSFET สำหรับประจุเกตและความจุ เนื่องจากในบางกรณีอาจคิดเป็นสัดส่วนมากถึง 30% ของกระแสประจุทั้งหมด จึงจำเป็นต้องพิจารณา โดยเฉพาะอย่างยิ่งในการออกแบบที่ใช้ MOSFET ขนาดใหญ่และกระแสสูง
สำหรับการออกแบบที่ใช้ MOSFET ที่มีประจุเกตต่ำ สามารถสันนิษฐานได้ว่ากระแสเกตจะเพิ่มขึ้นอย่างรวดเร็ว ซึ่งจะส่งผลให้กระแสเพิ่มขึ้นจาก 0 A เป็น I TRIP อย่างรวดเร็ว ซึ่งอาจก่อให้เกิดสัญญาณรบกวนที่ไม่พึงประสงค์ ในกรณีนี้ควรใช้การเริ่มต้นแบบนุ่มนวล (soft start )
ซอฟต์สตาร์ท
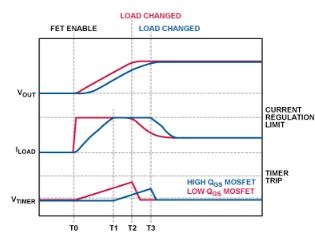
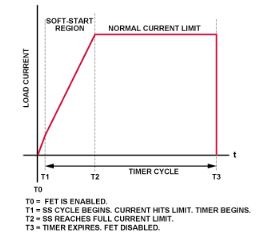
ด้วยระบบสตาร์ทแบบนุ่มนวล กระแสไฟกระชากจะค่อยๆ เพิ่มขึ้นอย่างเป็นเส้นตรงจากศูนย์ไปจนถึงค่าสูงสุดในช่วงเวลาที่กำหนดโดยตัวเก็บประจุ SS ซึ่งจะช่วยหลีกเลี่ยงผลกระทบฉับพลันจากขีดจำกัด 30 แอมป์ และทำได้โดยการค่อยๆ เพิ่มกระแสอ้างอิง โปรดทราบว่ากระแสจะอยู่ในช่วงควบคุมระหว่างการทำงานของระบบสตาร์ทแบบนุ่มนวล ดังนั้นตัวจับเวลาจึงทำงานตั้งแต่วินาทีที่ระบบสตาร์ทแบบนุ่มนวลเริ่มต้นขึ้น ดังที่แสดงในรูปที่ 5
ดังนั้น จึงแนะนำให้ตั้งเวลาเริ่มต้นแบบนุ่มนวลไม่เกิน 10% ถึง 20% ของเวลาทั้งหมดของตัวจับเวลา ในตัวอย่างนี้ เราสามารถเลือกเวลา 100 ไมโครวินาทีได้ ค่าความจุของ SS สามารถกำหนดได้ดังนี้:
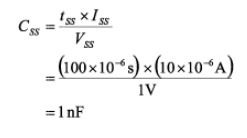
โดยที่ISS = 10 μA และVSS = 1 V
การเลือก MOSFET และ TIMER
ขั้นตอนแรกในการเลือก MOSFET ที่เหมาะสมคือการเลือก เกณฑ์ VDSและIDสำหรับระบบ 12 โวลต์ VDS ควรเป็น 30 โวลต์หรือ 40 โวลต์เพื่อรับมือกับแรงดันชั่วขณะที่อาจทำลาย MOSFET ได้ ส่วน ID ของ MOSFET ควรมีค่ามากกว่าค่าสูงสุดที่ต้องการมาก (ดูแผนภูมิ SOA ในรูปที่ 3) ในการใช้งานกระแสสูง คุณสมบัติที่สำคัญที่สุดอย่างหนึ่งคือ R DSONของ MOSFET ค่าต่ำของพารามิเตอร์นี้จะช่วยให้มั่นใจได้ว่าพลังงานที่สูญเสียใน MOSFET จะน้อยที่สุดเมื่อทำงานเต็มประสิทธิภาพในสภาวะการทำงานปกติ และจะเกิดความร้อนน้อยที่สุดเมื่อทำงานเต็มกำลัง
ข้อควรพิจารณาด้านความร้อนและพลังงาน
ก่อนที่จะพิจารณารายละเอียดเฉพาะของ SOA และการเลือก TIMER จำเป็นต้องพิจารณาการกระจายพลังงานของ MOSFET ที่โหลด DC เต็มที่ก่อน เนื่องจากต้องหลีกเลี่ยงความร้อนสูงเกินไป เมื่ออุณหภูมิของ MOSFET สูงขึ้น กำลังไฟฟ้าของมันจะลดลง หรือถูกลดระดับลงนอกจากนี้ การใช้งาน MOSFET ที่อุณหภูมิสูงจะทำให้อายุการใช้งานลดลงด้วย
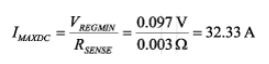
โปรดจำไว้ว่าตัวควบคุม Hot-swap จะเริ่มทำงานของ TIMER เมื่อแรงดันตรวจจับต่ำสุดอยู่ที่ 92 mV สำหรับการคำนวณนี้ เราจำเป็นต้องทราบกระแสตรงสูงสุดที่เป็นไปได้ที่สามารถไหลได้โดยไม่ทำให้ TIMER ทำงาน สมมติว่าค่า V REGMIN ที่แย่ที่สุด คือ 97 mV จากนั้น
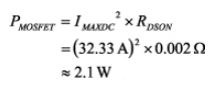
สมมติว่า ค่าความต้านทานสูงสุดของ MOSFET คือ 2 มิลลิโอห์ม กำลังไฟฟ้าจะเป็นดังนี้
ค่าความต้านทานความร้อนของ MOSFET ที่อุณหภูมิแวดล้อมจะระบุไว้ในเอกสารข้อมูล ขนาดพื้นที่ติดตั้งและปริมาณทองแดงเพิ่มเติมจะมีผลต่อค่านี้ สมมติว่า
เนื่องจาก MOSFET ต้องระบายความร้อน 2.1 วัตต์ จึงคาดการณ์ได้ว่าอุณหภูมิสูงสุดที่อาจสูงขึ้นถึง 126 องศาเซลเซียสเหนืออุณหภูมิแวดล้อมนั้นเป็นไปได้
วิธีหนึ่งที่จะลดจำนวนนี้คือการใช้ MOSFET สองตัวขึ้นไปต่อขนานกัน วิธีนี้จะช่วยลดค่า R DSONและลดการสูญเสียพลังงานใน MOSFET ได้อย่างมีประสิทธิภาพ เมื่อใช้ MOSFET สองตัว อุณหภูมิที่เพิ่มขึ้นสูงสุดจะอยู่ที่ 32°C ต่อ MOSFET โดยสมมติว่ากระแสไฟฟ้าถูกแบ่งอย่างเท่าเทียมกันระหว่างอุปกรณ์ (ควรเผื่อความคลาดเคลื่อนไว้บ้าง) ตารางต่อไปนี้แสดงพลังงานใน MOSFET แต่ละตัว:
ด้วยอุณหภูมิที่เพิ่มขึ้นนี้ และอุณหภูมิแวดล้อมที่สมมติไว้ที่ T A = 30°C อุณหภูมิสูงสุดของตัวเรือน MOSFET แต่ละตัวจึงคาดว่าจะอยู่ที่ 62°C
ข้อควรพิจารณาเกี่ยวกับ SOA ของ MOSFET
ขั้นตอนต่อไปคือการตรวจสอบกราฟ SOA เพื่อหา MOSFET ที่เหมาะสมสำหรับรับมือกับสภาวะที่เลวร้ายที่สุด ในสภาวะลัดวงจรลงกราวด์ที่เลวร้ายที่สุด สามารถสมมติให้ V DSเป็น V MAXที่ 13.2 V ได้ เนื่องจากนี่จะเป็นแรงดันไฟฟ้าสูงสุดที่ปรากฏบน MOSFET เมื่อขั้วแหล่งกำเนิดถูกดึงลงกราวด์ ในการควบคุม สภาวะที่เลวร้ายที่สุดจะอิงตามข้อมูลจำเพาะสูงสุดในเอกสารข้อมูลสำหรับจุดควบคุมของตัวควบคุมแบบถอดเปลี่ยนขณะทำงาน ซึ่งเท่ากับ 103 mV จากนั้นสามารถคำนวณกระแสได้ดังนี้:
ก่อนที่จะนำไปเปรียบเทียบกับกราฟ SOA ของ MOSFET เราต้องพิจารณาการลดประสิทธิภาพของ MOSFET ตามอุณหภูมิ เนื่องจากกราฟ SOA นั้นอิงจากข้อมูลที่อุณหภูมิแวดล้อม T C = 25°C ก่อนอื่นให้คำนวณกำลังไฟฟ้าที่สูญเสียไปที่ T C = 25°C:

โดยที่R thJCถูกกำหนดไว้ในเอกสารข้อมูลของ MOSFET
ทีนี้ลองทำการคำนวณแบบเดียวกันสำหรับ T C = 62°C:
ดังนั้น ค่าตัวประกอบลดกำลัง 1.42 จึงคำนวณได้ดังนี้:
จำเป็นต้องนำหลักการนี้ไปใช้กับกราฟ SOA ของ MOSFET ในรูปที่ 3 เส้นทแยงมุมที่แสดงถึงเวลาที่ใช้กำลังไฟฟ้าสูงสุดจะต้องเลื่อนลงด้านล่างเพื่อให้สอดคล้องกับค่ากำลังไฟฟ้าที่ปรับแล้ว
ก่อนหน้านี้เราได้ใช้เส้น 1 มิลลิวินาทีเป็นตัวอย่างเพื่ออธิบายวิธีการทำงานของเส้นโค้ง เช่น พิจารณาจุดหนึ่งบนเส้นนั้น—สมมติว่า (20 A, 40 V)—กำลังไฟฟ้า ณ จุดนั้นคือ 800 W เมื่อใช้สูตรการลดกำลังไฟฟ้า:
ที่แรงดัน 40 V กระแสไฟฟ้าที่สอดคล้องกับกำลังไฟที่ลดลงคือ 14 A การพล็อตจุดนี้ลงบนกราฟ SOA จะได้จุดบนเส้น 1 มิลลิวินาทีที่ลดลงที่อุณหภูมิ 62°C เส้น 10 มิลลิวินาทีและ 100 ไมโครวินาทีใหม่สามารถกำหนดได้ด้วยวิธีเดียวกัน เส้นใหม่เหล่านี้แสดงด้วยสีแดงในรูปที่ 6
การเลือกตัวเก็บประจุสำหรับตัวตั้งเวลา
เส้นลดกำลังใหม่ของ SOA สามารถใช้ในการคำนวณค่า TIMER ใหม่ได้ ลากเส้นแนวนอนจากI MAX ≈ 35 A และเส้นแนวตั้งจากV MAX = 13.2 V (เส้นสีน้ำเงินจางๆ) จากนั้นกำหนดจุดตัดของเส้นทั้งสองกับเส้นสีแดง จุดตัดเหล่านี้บ่งบอกถึงช่วงเวลาประมาณ 1 มิลลิวินาทีถึง 10 มิลลิวินาที อาจจะประมาณ 2 มิลลิวินาที การได้ตัวเลขที่ถูกต้องแม่นยำในบริเวณเล็กๆ ของกราฟในมาตราส่วนลอการิทึมนั้นทำได้ยาก ดังนั้นจึงควรเลือกค่าที่ระมัดระวังเพื่อให้แน่ใจว่ามีการใช้ค่าความคลาดเคลื่อนที่เพียงพอ โดยคำนึงถึงผลกระทบของการเลือกเหล่านี้ต่อเกณฑ์อื่นๆ เช่น ประสิทธิภาพและราคาด้วย
โปรดจำไว้ว่าเวลาโดยประมาณในการชาร์จโหลดคือประมาณ 850 ไมโครวินาที เนื่องจากเวลาซอฟต์สตาร์ทถูกกำหนดโดยการเพิ่มขึ้นแบบเชิงเส้น จึงใช้เวลานานกว่า (เมื่อเทียบกับการเปลี่ยนแปลงแบบขั้นบันได) ในการชาร์จตัวเก็บประจุของโหลด ในการประมาณปริมาณประจุทั้งหมด ให้สมมติว่าครึ่งหนึ่งของเวลาซอฟต์สตาร์ทจะต้องถูกเพิ่มเข้าไปในเวลาที่คำนวณได้หากใช้ซอฟต์สตาร์ท ดังนั้นให้เพิ่มครึ่งหนึ่งของเวลาซอฟต์สตาร์ท (50 ไมโครวินาที) เข้ากับ 850 ไมโครวินาที ส่งผลให้เวลาทั้งหมดประมาณ 900 ไมโครวินาที หาก MOSFET ที่เลือกมีประจุเกตขนาดใหญ่ (เช่น ≥80 นาโนคูลอมบ์) อาจลดเวลาลงได้อีกตามที่ได้กล่าวไว้ก่อนหน้านี้ หากเวลาในการชาร์จโหลดน้อยกว่าเวลา SOA สูงสุด MOSFET นั้นก็เหมาะสม ในกรณีนี้ ตรงตามเกณฑ์ (0.9 มิลลิวินาที < 2 มิลลิวินาที)
ค่า TIMER ที่น้อยกว่า 2 มิลลิวินาที น่าจะเพียงพอสำหรับการป้องกัน MOSFET และค่าที่มากกว่า 0.9 มิลลิวินาที จะใช้สำหรับการประจุโหลด หากเลือกค่าที่ระมัดระวังไว้ที่ 1 มิลลิวินาที สามารถคำนวณค่าความจุได้ดังนี้:
โดยที่IT IMER = 60 μA และVTIMER = 1.3 V
เมื่อใช้ MOSFET แบบขนาน การคำนวณสำหรับการเลือก TIMER จะไม่เปลี่ยนแปลง สิ่งสำคัญคือต้องออกแบบ TIMER และระบบป้องกันการลัดวงจรโดยคำนึงถึง MOSFET ตัวเดียว เหตุผลก็คือ ค่า V GSTHอาจแตกต่างกันอย่างมากในกลุ่ม MOSFET ดังนั้น MOSFET ตัวเดียวอาจจำเป็นต้องจัดการกระแสไฟฟ้าส่วนใหญ่ในระหว่างการควบคุม
การออกแบบ Hot-Swap เสร็จสมบูรณ์แล้ว
การออกแบบแบบถอดเปลี่ยนขณะทำงาน (hot-swap) โดยใช้ MOSFET แบบขนาน สามารถดูได้ในรูปที่ 7 พร้อมค่าส่วนประกอบที่ถูกต้อง ตัวควบคุม hot-swap ADM1177 ทำหน้าที่เพิ่มเติม คือ มี ADC ในตัวที่สามารถใช้แปลงแรงดันไฟฟ้าและกระแสโหลดเป็นข้อมูลดิจิทัล ซึ่งสามารถอ่านได้ผ่านทางบัส I2C ทำให้มีฟังก์ชันการตรวจสอบกระแสและแรงดันไฟฟ้าแบบครบวงจร




ผลิตภัณฑ์
June 8, 2026
ทำความเข้าใจเกี่ยวกับการเปลี่ยนอุปกรณ์ขณะทำงาน (Hot Swap): ตัวอย่างกระบวนการออกแบบวงจร Hot-Swap
เรียนรู้วิธีการออกแบบวงจรถอดเปลี่ยนอุปกรณ์ขณะทำงานที่มีความทนทานสูง เพื่อปกป้องฮาร์ดแวร์ระหว่างการเสียบใช้งานในขณะที่อุปกรณ์ยังทำงานอยู่
by
นักเขียนบทความ

